|
Drake
|
|
Drake
|
The JointActuator class is mostly a simple bookkeeping structure to represent an actuator acting on a given Joint.
It helps to flag whether a given Joint is actuated or not so that MultibodyTree clients can apply forces on actuated joints through their actuators, see AddInOneForce().
| T | The scalar type, which must be one of the default scalars. |
#include <drake/multibody/tree/joint_actuator.h>
Public Member Functions | |
| JointActuator (const std::string &name, const Joint< T > &joint, double effort_limit=std::numeric_limits< double >::infinity()) | |
| Creates an actuator for joint with the given name. | |
| ~JointActuator () final | |
| JointActuatorIndex | index () const |
| Returns this element's unique index. | |
| const std::string & | name () const |
| Returns the name of the actuator. | |
| const Joint< T > & | joint () const |
| Returns a reference to the joint actuated by this JointActuator. | |
| void | AddInOneForce (const systems::Context< T > &context, int joint_dof, const T &tau, MultibodyForces< T > *forces) const |
| Adds into forces a force along one of the degrees of freedom of the Joint actuated by this actuator. | |
| const Eigen::Ref< const VectorX< T > > | get_actuation_vector (const VectorX< T > &u) const |
| Gets the actuation values for this actuator from the actuation vector u for the entire plant model. | |
| void | set_actuation_vector (const Eigen::Ref< const VectorX< T > > &u_actuator, EigenPtr< VectorX< T > > u) const |
| Given the actuation values u_actuator for this actuator, updates the actuation vector u for the entire multibody model to which this actuator belongs to. | |
| int | input_start () const |
| Returns the index to the first element for this joint actuator / within the vector of actuation inputs for the full multibody / system. | |
| int | num_inputs () const |
| Returns the number of inputs associated with this actuator. | |
| double | effort_limit () const |
| Returns the actuator effort limit. | |
| void | set_effort_limit (double effort_limit) |
| Sets the actuator effort limit. (To clear the limit, set it to +∞.). | |
Does not allow copy, move, or assignment | |
| JointActuator (const JointActuator &)=delete | |
| JointActuator & | operator= (const JointActuator &)=delete |
| JointActuator (JointActuator &&)=delete | |
| JointActuator & | operator= (JointActuator &&)=delete |
Reflected Inertia | |
The JointActuator class offers the ability to model the effects of reflected inertia for revolute and prismatic joints via an approximation commonly used in robotics (see [Featherstone, 2008]). Reflected inertia is an approximate method for accounting for the mass/inertia contributions to kinetic energy and equations of motion for effects of a spinning motor's rotor (and any additional shafts/gears) inside a gearmotor. This "quick and dirty" approximation does not depend on the internals of the gearbox (e.g., whether there is a single stage or multistage gear, whether there are additional shafts/gears, or the relative position or orientation of the outboard shaft with respect to the motor rotor's shaft. Note: Reflected inertia does not account for mass/inertia of the body attached to the gearmotor's output shaft (labeled S in the figure below). The value of reflected inertia is a function of the gear ratio and the rotor inertia of the modeled motor. JointActuator exposes these two values as parameters (see SetRotorInertia() and SetGearRatio()). Reflected inertia has units of kg for prismatic joints and units of kg⋅m² for revolute joints. A zero value indicates reflected inertia is not modeled. This value is used as part of an approximation of a rotor's inertial effects in a geared motor. It should be noted that the approximation is reasonable for high gear ratios but less so for small gear ratios (see [Featherstone, 2008], Chapter 9.6 on gears). 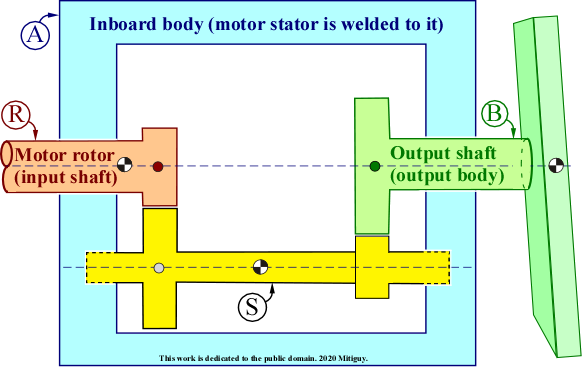
Actuated revolute jointsFor an actuator driving a revolute joint, the reflected inertia can be estimated from the rotational inertia Iᵣ of the actuator's rotor about its axis of rotation and from the dimensionless gear ratio ρ. To define gear ratio ρ, consider a gear-motor combination that has a stator/rigid case A, motor rotor R, and output shaft B. Rotor R spins relative to stator A with angular speed wR and shaft B spins relative to stator A with angular speed wB. The gear ratio is defined ρ ≝ wR / wB. Typically, ρ >> 1. For this gear-motor, reflected inertia Iᵣᵢ = ρ² ⋅ Iᵣ. Actuated prismatic jointsTo define the gear ratio ρ for prismatic joints, consider a gear-motor combination that has a stator/rigid case A, motor rotor R, and translating output shaft B. Rotor R spins relative to stator A with angular speed wR and shaft B translates relative to stator A with translational speed vB. The gear ratio is defined ρ ≝ wR / vB (units of 1/m). Typically, ρ >> 1. For the gear-motor here, reflected inertia Iᵣᵢ = ρ² ⋅ Iᵣ (units of kg). | |
| double | default_rotor_inertia () const |
| Gets the default value for this actuator's rotor inertia. | |
| double | default_gear_ratio () const |
| Gets the default value for this actuator's gear ratio. | |
| void | set_default_rotor_inertia (double rotor_inertia) |
| Sets the default value for this actuator's rotor inertia. | |
| void | set_default_gear_ratio (double gear_ratio) |
| Sets the default value for this actuator's gear ratio. | |
| double | default_reflected_inertia () const |
| Returns the default value for this actuator's reflected inertia. | |
| const T & | rotor_inertia (const systems::Context< T > &context) const |
| Returns the associated rotor inertia value for this actuator, stored in context. | |
| const T & | gear_ratio (const systems::Context< T > &context) const |
| Returns the associated gear ratio value for this actuator, stored in context. | |
| void | SetRotorInertia (systems::Context< T > *context, const T &rotor_inertia) const |
| Sets the associated rotor inertia value for this actuator in context. | |
| void | SetGearRatio (systems::Context< T > *context, const T &gear_ratio) const |
| Sets the associated gear ratio value for this actuator in context. | |
| T | calc_reflected_inertia (const systems::Context< T > &context) const |
| Calculates the reflected inertia value for this actuator in context. | |
PD Controlled Actuators | |
Refer to Actuation for further details on the modeling of PD controlled actuators. | |
| void | set_controller_gains (PdControllerGains gains) |
| Set controller gains for this joint actuator. | |
| bool | has_controller () const |
| Returns true if any non-zero controller gains have been specified with a call to set_controller_gains(). | |
| const PdControllerGains & | get_controller_gains () const |
| Returns a reference to the controller gains for this actuator. | |
| Public Member Functions inherited from MultibodyElement< T > | |
| virtual | ~MultibodyElement () |
| ModelInstanceIndex | model_instance () const |
| Returns the ModelInstanceIndex of the model instance to which this element belongs. | |
| template<typename = void> | |
| const MultibodyPlant< T > & | GetParentPlant () const |
| Returns the MultibodyPlant that owns this MultibodyElement. | |
| void | DeclareParameters (internal::MultibodyTreeSystem< T > *tree_system) |
| Declares MultibodyTreeSystem Parameters at MultibodyTreeSystem::Finalize() time. | |
| void | SetDefaultParameters (systems::Parameters< T > *parameters) const |
| Sets default values of parameters belonging to each MultibodyElement in parameters at a call to MultibodyTreeSystem::SetDefaultParameters(). | |
| void | DeclareDiscreteState (internal::MultibodyTreeSystem< T > *tree_system) |
| Declares MultibodyTreeSystem discrete states. | |
| void | DeclareCacheEntries (internal::MultibodyTreeSystem< T > *tree_system) |
| (Advanced) Declares all cache entries needed by this element. | |
| bool | is_ephemeral () const |
| Returns true if this MultibodyElement was added during Finalize() rather than something a user added. | |
| void | set_is_ephemeral (bool is_ephemeral) |
| (Internal use only) Sets the is_ephemeral flag to the indicated value. | |
| MultibodyElement (const MultibodyElement &)=delete | |
| MultibodyElement & | operator= (const MultibodyElement &)=delete |
| MultibodyElement (MultibodyElement &&)=delete | |
| MultibodyElement & | operator= (MultibodyElement &&)=delete |
Friends | |
| template<typename U> | |
| class | JointActuator |
Additional Inherited Members | |
| Protected Member Functions inherited from MultibodyElement< T > | |
| MultibodyElement () | |
| Default constructor made protected so that sub-classes can still declare their default constructors if they need to. | |
| MultibodyElement (ModelInstanceIndex model_instance) | |
| Constructor which allows specifying a model instance. | |
| MultibodyElement (ModelInstanceIndex model_instance, int64_t index) | |
| Both the model instance and element index are specified. | |
| template<typename ElementIndexType> | |
| ElementIndexType | index_impl () const |
| Returns this element's unique index. | |
| template<typename ElementOrdinalType = int64_t> | |
| ElementOrdinalType | ordinal_impl () const |
| Returns this element's unique ordinal. | |
| const internal::MultibodyTree< T > & | get_parent_tree () const |
| Returns a constant reference to the parent MultibodyTree that owns this element. | |
| const internal::MultibodyTreeSystem< T > & | GetParentTreeSystem () const |
| Returns a constant reference to the parent MultibodyTreeSystem that owns the parent MultibodyTree that owns this element. | |
| void | SetTopology () |
| (Internal use only) Gives MultibodyElement-derived objects the opportunity to set data members that depend on topology and coordinate assignments having been finalized. | |
| virtual void | DoDeclareDiscreteState (internal::MultibodyTreeSystem< T > *) |
| Implementation of the NVI DeclareDiscreteState(). | |
| virtual void | DoDeclareCacheEntries (internal::MultibodyTreeSystem< T > *) |
| Derived classes must override this method to declare cache entries needed by this element. | |
| systems::NumericParameterIndex | DeclareNumericParameter (internal::MultibodyTreeSystem< T > *tree_system, const systems::BasicVector< T > &model_vector) |
| To be used by MultibodyElement-derived objects when declaring parameters in their implementation of DoDeclareParameters(). | |
| systems::AbstractParameterIndex | DeclareAbstractParameter (internal::MultibodyTreeSystem< T > *tree_system, const AbstractValue &model_value) |
| To be used by MultibodyElement-derived objects when declaring parameters in their implementation of DoDeclareParameters(). | |
| systems::DiscreteStateIndex | DeclareDiscreteState (internal::MultibodyTreeSystem< T > *tree_system, const VectorX< T > &model_value) |
| To be used by MultibodyElement-derived objects when declaring discrete states in their implementation of DoDeclareDiscreteStates(). | |
| systems::CacheEntry & | DeclareCacheEntry (internal::MultibodyTreeSystem< T > *tree_system, std::string description, systems::ValueProducer value_producer, std::set< systems::DependencyTicket > prerequisites_of_calc) |
| To be used by MultibodyElement-derived objects when declaring cache entries in their implementation of DoDeclareCacheEntries(). | |
| bool | has_parent_tree () const |
| Returns true if this multibody element has a parent tree, otherwise false. | |
|
delete |
|
delete |
| JointActuator | ( | const std::string & | name, |
| const Joint< T > & | joint, | ||
| double | effort_limit = std::numeric_limits< double >::infinity() ) |
Creates an actuator for joint with the given name.
The name must be unique within the given multibody model. This is enforced by MultibodyPlant::AddJointActuator().
| [in] | name | A string with a name identifying this actuator. |
| [in] | joint | The joint that the created actuator will act on. |
| [in] | effort_limit | The maximum effort for the actuator. It must be strictly positive, otherwise an std::exception is thrown. If +∞, the actuator has no limit, which is the default. The effort limit has physical units in accordance to the joint type it actuates. For instance, it will have units of N⋅m (torque) for revolute joints while it will have units of N (force) for prismatic joints. |
|
final |
| void AddInOneForce | ( | const systems::Context< T > & | context, |
| int | joint_dof, | ||
| const T & | tau, | ||
| MultibodyForces< T > * | forces ) const |
Adds into forces a force along one of the degrees of freedom of the Joint actuated by this actuator.
The meaning for this degree of freedom, sign conventions and even its dimensional units depend on the specific joint sub-class being actuated. For a RevoluteJoint for instance, joint_dof can only be 0 since revolute joints's motion subspace only has one degree of freedom, while the units of tau are those of torque (N⋅m in the MKS system of units). For multi-dof joints please refer to the documentation provided by specific joint sub-classes regarding the meaning of joint_dof.
| [in] | context | The context storing the state and parameters for the model to which this joint belongs. |
| [in] | joint_dof | Index specifying one of the degrees of freedom for this joint. The index must be in the range 0 <= joint_dof < num_inputs() or otherwise this method will throw an exception. |
| [in] | tau | Generalized force corresponding to the degree of freedom indicated by joint_dof to be added into forces. Refer to the specific Joint sub-class documentation for details on the meaning and units for this degree of freedom. |
| [out] | forces | On return, this method will add force tau for the degree of freedom joint_dof into the output forces. This method aborts if forces is nullptr or if forces doest not have the right sizes to accommodate a set of forces for the model to which this actuator belongs. |
| T calc_reflected_inertia | ( | const systems::Context< T > & | context | ) | const |
Calculates the reflected inertia value for this actuator in context.
See reflected_inertia. Note that this ONLY depends on the Parameters in the context; it does not depend on time, input, state, etc.
| double default_gear_ratio | ( | ) | const |
Gets the default value for this actuator's gear ratio.
See reflected_inertia.
| double default_reflected_inertia | ( | ) | const |
Returns the default value for this actuator's reflected inertia.
It is calculated as ρ²⋅Iᵣ, where ρ is the default gear ratio and Iᵣ is the default rotor inertia for this actuator. See reflected_inertia.
| double default_rotor_inertia | ( | ) | const |
Gets the default value for this actuator's rotor inertia.
See reflected_inertia.
| double effort_limit | ( | ) | const |
Returns the actuator effort limit.
| const T & gear_ratio | ( | const systems::Context< T > & | context | ) | const |
Returns the associated gear ratio value for this actuator, stored in context.
See reflected_inertia. Note that this ONLY depends on the Parameters in the context; it does not depend on time, input, state, etc.
| const Eigen::Ref< const VectorX< T > > get_actuation_vector | ( | const VectorX< T > & | u | ) | const |
Gets the actuation values for this actuator from the actuation vector u for the entire plant model.
| std::exception | if this element is not associated with a MultibodyPlant. |
| const PdControllerGains & get_controller_gains | ( | ) | const |
Returns a reference to the controller gains for this actuator.
| bool has_controller | ( | ) | const |
Returns true if any non-zero controller gains have been specified with a call to set_controller_gains().
| JointActuatorIndex index | ( | ) | const |
Returns this element's unique index.
| int input_start | ( | ) | const |
Returns the index to the first element for this joint actuator / within the vector of actuation inputs for the full multibody / system.
Returns -1 if this JointActuator hasn't been added to a MultibodyPlant.
| const Joint< T > & joint | ( | ) | const |
Returns a reference to the joint actuated by this JointActuator.
| std::exception | if this element is not associated with a MultibodyPlant. |
| const std::string & name | ( | ) | const |
Returns the name of the actuator.
| int num_inputs | ( | ) | const |
Returns the number of inputs associated with this actuator.
This is always the number of degrees of freedom of the actuated joint.
|
delete |
|
delete |
| const T & rotor_inertia | ( | const systems::Context< T > & | context | ) | const |
Returns the associated rotor inertia value for this actuator, stored in context.
See reflected_inertia. Note that this ONLY depends on the Parameters in the context; it does not depend on time, input, state, etc.
| void set_actuation_vector | ( | const Eigen::Ref< const VectorX< T > > & | u_actuator, |
| EigenPtr< VectorX< T > > | u ) const |
Given the actuation values u_actuator for this actuator, updates the actuation vector u for the entire multibody model to which this actuator belongs to.
| [in] | u_actuator | Actuation values for this actuator. It must be of size equal to num_inputs(). For units and sign conventions refer to the specific Joint sub-class documentation. |
| [in,out] | u | Actuation values for the entire plant model to which this actuator belongs to. The actuation value in u for this actuator must be found at offset input_start(). Only values corresponding to this actuator are changed. |
| std::exception | if u_actuator.size() != this->num_inputs(). |
| std::exception | if u is nullptr. |
| std::exception | if this element is not associated with a MultibodyPlant. |
| std::exception | if u.size() != this->GetParentPlant().num_actuated_dofs(). |
| void set_controller_gains | ( | PdControllerGains | gains | ) |
Set controller gains for this joint actuator.
This enables the modeling of a simple PD controller of the form: ũ = -Kp⋅(q − qd) - Kd⋅(v − vd) + u_ff u = max(−e, min(e, ũ)) where qd and vd are the desired configuration and velocity for joint(), Kp and Kd are the proportional and derivative gains specified in gains, u_ff is the feedforward actuation and e corresponds to effort_limit().
The gains must be finite and non-negative. Setting both gains to zero will remove the controller (has_controller() will return false).
For simulation, feedforward actuation can be provided through MultibodyPlant::get_actuation_input_port(). Desired configuration and velocity are specified through MultibodyPlant::get_desired_state_input_port().
PD control is currently only supported for a discrete time plant. Attempting to use non-zero gains on a continuous time plant will result in an exception. See pd_controllers_and_ports for further details.
| void set_default_gear_ratio | ( | double | gear_ratio | ) |
Sets the default value for this actuator's gear ratio.
See reflected_inertia.
| void set_default_rotor_inertia | ( | double | rotor_inertia | ) |
Sets the default value for this actuator's rotor inertia.
See reflected_inertia.
| void set_effort_limit | ( | double | effort_limit | ) |
Sets the actuator effort limit. (To clear the limit, set it to +∞.).
| void SetGearRatio | ( | systems::Context< T > * | context, |
| const T & | gear_ratio ) const |
Sets the associated gear ratio value for this actuator in context.
See reflected_inertia.
| void SetRotorInertia | ( | systems::Context< T > * | context, |
| const T & | rotor_inertia ) const |
Sets the associated rotor inertia value for this actuator in context.
See reflected_inertia.
|
friend |