|
Drake
|
|
Drake
|
MultibodyPlant is a Drake system framework representation (see systems::System) for the model of a physical system consisting of a collection of interconnected bodies.
See Multibody Kinematics and Dynamics for an overview of concepts/notation.
| MultibodyPlant |
|
The ports whose names begin with model_instance_name[i] represent groups of ports, one for each of the model instances, with i ∈ {0, ..., N-1} for the N model instances. If a model instance does not contain any data of the indicated type the port will still be present but its value will be a zero-length vector. (Model instances world_model_instance() and default_model_instance() always exist.)
The ports shown in green are for communication with Drake's SceneGraph system for dealing with geometry.
MultibodyPlant provides a user-facing API for:
A MultibodyPlant may contain multiple model instances. Each model instance corresponds to a set of bodies and their connections (joints). Model instances provide methods to get or set the state of the set of bodies (e.g., through GetPositionsAndVelocities() and SetPositionsAndVelocities()), connecting controllers (through get_state_output_port() and get_actuation_input_port()), and organizing duplicate models (read through a parser). In fact, many MultibodyPlant methods are overloaded to allow operating on the entire plant or just the subset corresponding to the model instance; for example, one GetPositions() method obtains the generalized positions for the entire plant while another GetPositions() method obtains the generalized positions for model instance.
Model instances are frequently defined through SDFormat files (using the model tag) and are automatically created when SDFormat files are parsed (by Parser). There are two special multibody::ModelInstanceIndex values. The world body is always multibody::ModelInstanceIndex 0. multibody::ModelInstanceIndex 1 is reserved for all elements with no explicit model instance and is generally only relevant for elements created programmatically (and only when a model instance is not explicitly specified). Note that Parser creates model instances (resulting in a multibody::ModelInstanceIndex ≥ 2) as needed.
See num_model_instances(), num_positions(), num_velocities(), num_actuated_dofs(), AddModelInstance() GetPositionsAndVelocities(), GetPositions(), GetVelocities(), SetPositionsAndVelocities(), SetPositions(), SetVelocities(), GetPositionsFromArray(), GetVelocitiesFromArray(), SetPositionsInArray(), SetVelocitiesInArray(), SetActuationInArray(), HasModelInstanceNamed(), GetModelInstanceName(), get_state_output_port(), get_actuation_input_port().
The state of a multibody system x = [q; v] is given by its generalized positions vector q, of size nq (see num_positions()), and by its generalized velocities vector v, of size nv (see num_velocities()).
A MultibodyPlant can be constructed to be either continuous or discrete. The choice is indicated by the time_step passed to the constructor – a non-zero time_step indicates a discrete plant, while a zero time_step indicates continuous. A Simulator will step a discrete plant using the indicated time_step, but will allow a numerical integrator to choose how to advance time for a continuous MultibodyPlant.
We'll discuss continuous plant dynamics in this section. Discrete dynamics is more complicated and gets its own section below.
As a Drake System, MultibodyPlant implements the governing equations for a multibody dynamical system in the form ẋ = f(t, x, u) with t being time and u external inputs such as actuation forces. The governing equations for the dynamics of a multibody system modeled with MultibodyPlant are [Featherstone 2008, Jain 2010]:
q̇ = N(q)v
(1) M(q)v̇ + C(q, v)v = τ
where M(q) is the mass matrix of the multibody system (including rigid body mass properties and reflected inertias), C(q, v)v contains Coriolis, centripetal, and gyroscopic terms and N(q) is the kinematic coupling matrix describing the relationship between q̇ (the time derivatives of the generalized positions) and the generalized velocities v, [Seth 2010]. N(q) is an nq x nv matrix. The vector τ ∈ ℝⁿᵛ on the right hand side of Eq. (1) is the system's generalized forces. These incorporate gravity, springs, externally applied body forces, constraint forces, and contact forces.
We'll start with the basic difference equation interpretation of a discrete plant and then explain some Drake-specific subtleties.
By default, a discrete MultibodyPlant has these update dynamics:
x[0] = initial kinematics state variables x (={q, v}), s
s[0] = empty (no sample yet)
s[n+1] = g(t[n], x[n], u[n]) record sample
x[n+1] = f(t[n], x[n], u[n]) update kinematics
yd[n+1] = gd(s) dynamic outputs use sampled values
yk[n+1] = gk(x) kinematic outputs use current x
Optionally, output port sampling can be disabled. In that case we have:
x[n+1] = f(t[n], x[n], u[n]) update kinematics yd[n+1] = gd(g(t, x, u)) dynamic outputs use current values yk[n+1] = gk(x) kinematic outputs use current x
We're using yd and yk above to represent the calculated values of dynamic and kinematic output ports, resp. Kinematic output ports are those that depend only on position and velocity: state, body_poses, body_spatial_velocities. Everything else depends on forces so is a dynamic output port: body_spatial_accelerations, generalized_acceleration, net_actuation, reaction_forces, and contact_results.
Use the function SetUseSampledOutputPorts() to choose which dynamics you prefer. The default behavior (output port sampling) is more efficient for simulation, but use slightly-different kinematics for the dynamic output port computations versus the kinematic output ports. Disabling output port sampling provides "live" output port results that are recalculated from the current state and inputs whenever changes occur. It also eliminates the sampling state variable (s above). Note that kinematic output ports (that is, those depending only on position and velocity) are always "live" – they are calculated as needed from the current (updated) state.
The reason that the default mode is more efficient for simulation is that the sample variable s records expensive-to-compute results (such as hydroelastic contact forces) that are needed to advance the state x. Those results are thus available for free at the start of step n. If instead we wait until after the state is updated to n+1, we would have to recalculate those expensive results at the new state in order to report them. Thus sampling means the output ports show the results that were calculated using kinematics values x[n], although the Context has been updated to kinematics values x[n+1]. If that isn't tolerable you should disable output port sampling. You can also force an update to occur using ExecuteForcedEvents().
See Output port sampling below for more practical considerations.
Minor details most users won't care about:
As described in Discrete system dynamics above, the semantics of certain MultibodyPlant output ports depends on whether the plant is configured to advance using continuous time integration or discrete time steps (see is_discrete()). This section explains the details, focusing on the practical aspects moreso than the equations.
Output ports that only depend on the [q, v] kinematic state (such as get_body_poses_output_port() or get_body_spatial_velocities_output_port()) do not change semantics for continuous vs discrete time. In all cases, the output value is a function of the kinematic state in the context.
Output ports that incorporate dynamics (i.e., forces) do change semantics based on the plant mode. Imagine that the get_applied_spatial_force_input_port() provides a continuously time-varying input force. The get_body_spatial_accelerations_output_port() output is dependent on that force. We could return a snapshot of the acceleration that was used in the last time step, or we could recalculate the acceleration to immediately reflect the changing forces. We call the former a "sampled" port and the latter a "live" port.
For a continuous-time plant, there is no distinction – the output port is always live – it immediately reflects the instantaneous input value. It is a "direct feedthrough" output port (see SystemBase::GetDirectFeedthroughs()).
For a discrete-time plant, the user can choose whether the output should be sampled or live: Use the function SetUseSampledOutputPorts() to change whether output ports are sampled or not, and has_sampled_output_ports() to check the current setting. When sampling is disabled, the only state in the context is the kinematic [q, v], so dynamics output ports will always reflect the instantaneous answer (i.e., direct feedthrough). When sampling is enabled (the default), the plant state incorporates a snapshot of the most recent step's kinematics and dynamics, and the output ports will reflect that sampled state (i.e., not direct feedthrough). For a detailed discussion, see Discrete system dynamics.
For a discrete-time plant, the sampled outputs are generally much faster to calculate than the feedthrough outputs when any inputs ports are changing values faster than the discrete time step, e.g., during a simulation. When input ports are fixed, or change at the time step rate (e.g., during motion planning), sampled vs feedthrough will have similar computational performance.
Direct plant API function calls (e.g., EvalBodySpatialAccelerationInWorld()) that depend on forces always use the instantaneous (not sampled) accelerations.
Here are some practical tips that might help inform your particular situation:
(1) If you need a minimal-state representation for motion planning, mathematical optimization, or similar, then you can either use a continuous-time plant or set the config option use_sampled_output_ports=false on a discrete-time plant.
(2) By default, setting the positions of a discrete-time plant in the Context will not have any effect on the dynamics-related output ports, e.g., the contact results will not change. If you need to see changes to outputs without running the plant in a Simulator, then you can either use a continuous-time plant, set the config option use_sampled_output_ports=false, or use ExecuteForcedEvents() to force a dynamics step and then the outputs (and positions) will change.
In a MultibodyPlant model an actuator can be added as a JointActuator, see AddJointActuator(). The plant declares actuation input ports to provide feedforward actuation, both for the MultibodyPlant as a whole (see get_actuation_input_port()) and for each individual model instance in the MultibodyPlant (see get_actuation_input_port(ModelInstanceIndex)).
While PD controllers can be modeled externally and be connected to the MultibodyPlant model via the get_actuation_input_port(), simulation stability at discrete-time steps can be compromised for high controller gains. For such cases, simulation stability and robustness can be improved significantly by moving your PD controller into the plant where the discrete solver can strongly couple controller and model dynamics.
PD controlled joint actuators can be defined by setting PD gains for each joint actuator, see JointActuator::set_controller_gains(). Unless these gains are specified, joint actuators will not be PD controlled and JointActuator::has_controller() will return false.
For models with PD controllers, the actuation torque per actuator is computed according to:
ũ = -Kp⋅(q − qd) - Kd⋅(v − vd) + u_ff u = max(−e, min(e, ũ))
where qd and vd are desired configuration and velocity (see get_desired_state_input_port()) for the actuated joint (see JointActuator::joint()), Kp and Kd are the proportional and derivative gains of the actuator (see JointActuator::get_controller_gains()), u_ff is the feed-forward actuation specified with get_actuation_input_port(), and e corresponds to effort limit (see JointActuator::effort_limit()).
Notice that actuation through get_actuation_input_port() and PD control are not mutually exclusive, and they can be used together. This is better explained through examples:
Actuation input ports and desired state input ports need not be connected:
Note that both ports are always created but will be zero-sized for model instances without actuation.
The total joint actuation applied via the actuation input port (get_actuation_input_port()) and applied by the PD controllers is reported by the net actuation port (get_net_actuation_output_port()). That is, the net actuation port reports the total actuation applied by a given actuator.
Drake has the capability to load multibody models from SDFormat and URDF files. Consider the example below which loads an acrobot model:
As in the example above, for models including visual geometry, collision geometry or both, the user must specify a SceneGraph for geometry handling. You can find a full example of the LQR controlled acrobot in examples/multibody/acrobot/run_lqr.cc.
AddModelFromFile() can be invoked multiple times on the same plant in order to load multiple model instances. Other methods are available on Parser such as AddModels() which allows creating model instances per each <model> tag found in the file. Please refer to each of these methods' documentation for further details.
Probably the simplest way to add and wire up a MultibodyPlant with a SceneGraph in your Diagram is using AddMultibodyPlantSceneGraph().
Recommended usages:
Assign to a MultibodyPlant reference (ignoring the SceneGraph):
This flavor is the simplest, when the SceneGraph is not explicitly needed. (It can always be retrieved later via GetSubsystemByName("scene_graph").)
Assign to auto, and use the named public fields:
or taking advantage of C++'s structured binding:
This is the easiest way to use both the plant and scene_graph.
Assign to already-declared pointer variables:
This flavor is most useful when the pointers are class member fields (and so perhaps cannot be references).
MultibodyPlant users can register geometry with a SceneGraph for essentially two purposes; a) visualization and, b) contact modeling.
Before any geometry registration takes place, a user must first make a call to RegisterAsSourceForSceneGraph() in order to register the MultibodyPlant as a client of a SceneGraph instance, point at which the plant will have assigned a valid geometry::SourceId. At Finalize(), MultibodyPlant will declare input/output ports as appropriate to communicate with the SceneGraph instance on which registrations took place. All geometry registration must be performed pre-finalize.
Multibodyplant declares an input port for geometric queries, see get_geometry_query_input_port(). If MultibodyPlant registers geometry with a SceneGraph via calls to RegisterCollisionGeometry(), users may use this port for geometric queries. The port must be connected to the same SceneGraph used for registration. The preferred mechanism is to use AddMultibodyPlantSceneGraph() as documented above.
In extraordinary circumstances, this can be done by hand and the setup process will include:
Refer to the documentation provided in each of the methods above for further details.
MultibodyPlant's point contact model looks for model parameters stored as geometry::ProximityProperties by geometry::SceneGraph. These properties can be obtained before or after context creation through geometry::SceneGraphInspector APIs as outlined below. MultibodyPlant expects the following properties for point contact modeling:
| Group name | Property Name | Required | Property Type | Property Description |
|---|---|---|---|---|
| material | coulomb_friction | yes¹ | CoulombFriction<T> | Static and Dynamic friction. |
| material | point_contact_stiffness | no² | T | Compliant point contact stiffness. |
| material | hunt_crossley_dissipation | no²⁴ | T | Compliant contact dissipation. |
| material | relaxation_time | yes³⁴ | T | Linear Kelvin–Voigt model parameter. |
¹ Collision geometry is required to be registered with a geometry::ProximityProperties object that contains the ("material", "coulomb_friction") property. If the property is missing, MultibodyPlant will throw an exception.
² If the property is missing, MultibodyPlant will use a heuristic value as the default. Refer to the section Point Contact Default Parameters for further details.
³ When using a linear Kelvin–Voigt model of dissipation (for instance when selecting the SAP solver), collision geometry is required to be registered with a geometry::ProximityProperties object that contains the ("material", "relaxation_time") property. If the property is missing, an exception will be thrown.
⁴ We allow to specify both hunt_crossley_dissipation and relaxation_time for a given geometry. However only one of these will get used, depending on the configuration of the MultibodyPlant. As an example, if the SAP contact approximation is specified (see set_discrete_contact_approximation()) only the relaxation_time is used while hunt_crossley_dissipation is ignored. Conversely, if the TAMSI, Similar or Lagged approximation is used (see set_discrete_contact_approximation()) only hunt_crossley_dissipation is used while relaxation_time is ignored. Currently, a continuous MultibodyPlant model will always use the Hunt & Crossley model and relaxation_time will be ignored.
Accessing and modifying contact properties requires interfacing with geometry::SceneGraph's model inspector. Interfacing with a model inspector obtained from geometry::SceneGraph will provide the default registered values for a given parameter. These are the values that will initially appear in a systems::Context created by CreateDefaultContext(). Subsequently, true system parameters can be accessed and changed through a systems::Context once available. For both of the above cases, proximity properties are accessed through geometry::SceneGraphInspector APIs.
Before context creation an inspector can be retrieved directly from SceneGraph as:
After context creation, an inspector can be retrieved from the state stored in the context:
Once an inspector is available, proximity properties can be retrieved as:
Several MultibodyElements expose parameters, allowing the user flexible modification of some aspects of the plant's model, post systems::Context creation. For details, refer to the documentation for the MultibodyElement whose parameters you are trying to modify/access (e.g. RigidBody, FixedOffsetFrame, etc.)
As an example, here is how to access and modify rigid body mass parameters:
Another example, working with automatic differentiation in order to take derivatives with respect to one of the bodies' masses:
Add multibody elements to a MultibodyPlant with methods like:
All modeling elements must be added before Finalize() is called. See Finalize stage for a discussion.
Please refer to Contact Modeling in Drake for details on the available approximations, setup, and considerations for a multibody simulation with frictional contact.
MultibodyPlant implements the System energy and power methods, with some limitations.
See Drake issue #12942 for more discussion.
Once the user is done adding modeling elements and registering geometry, a call to Finalize() must be performed. This call will:
Note that MultibodyPlant will not introduce any automatic collision filters on deformable bodies. Collision filters for deformable bodies can be explicitly applied via ExcludeCollisionGeometriesWithCollisionFilterGroupPair() or during parsing.
| T | The scalar type, which must be one of the default scalars. |
#include <drake/multibody/plant/multibody_plant.h>
Public Member Functions | |
Does not allow copy, move, or assignment | |
| MultibodyPlant (const MultibodyPlant &)=delete | |
| MultibodyPlant & | operator= (const MultibodyPlant &)=delete |
| MultibodyPlant (MultibodyPlant &&)=delete | |
| MultibodyPlant & | operator= (MultibodyPlant &&)=delete |
Input and output ports | |
These methods provide access to the Drake System input and output ports as depicted in the MultibodyPlant class documentation. Actuation values can be provided through a single input port which describes the entire plant, or through multiple input ports which each provide the actuation values for a specific model instance. See AddJointActuator() and num_actuated_dofs(). Output ports provide information about the entire MultibodyPlant or its individual model instances. | |
| const systems::OutputPort< T > & | get_body_poses_output_port () const |
| Reports all body poses in the world frame as an abstract-valued output port containing an std::vector<math::RigidTransform<T>> of size num_bodies(). | |
| const systems::OutputPort< T > & | get_body_spatial_velocities_output_port () const |
| Reports all body spatial velocities in the world frame as an abstract-valued output port containing an std::vector<SpatialVelocity<T>> of size num_bodies(). | |
| const systems::OutputPort< T > & | get_body_spatial_accelerations_output_port () const |
| Reports all body spatial accelerations in the world frame as an abstract-valued output port containing an std::vector<SpatialAcceleration<T>> of size num_bodies(). | |
| const systems::InputPort< T > & | get_actuation_input_port () const |
| Returns a constant reference to the input port for external actuation for all actuated dofs. | |
| const systems::InputPort< T > & | get_actuation_input_port (ModelInstanceIndex model_instance) const |
| Returns a constant reference to the input port for external actuation for a specific model instance. | |
| const systems::OutputPort< T > & | get_net_actuation_output_port () const |
| Reports the actuation values applied by joint actuators as a vector-valued output port of size num_actuated_dofs(). | |
| const systems::OutputPort< T > & | get_net_actuation_output_port (ModelInstanceIndex model_instance) const |
| Reports the actuation values applied by joint actuators for the given model_instance as a vector-valued output port of size num_actuated_dofs(model_instance). | |
| const systems::InputPort< T > & | get_desired_state_input_port (ModelInstanceIndex model_instance) const |
| For models with PD controlled joint actuators, returns the port to provide the desired state for the given model_instance. | |
| const systems::InputPort< T > & | get_applied_generalized_force_input_port () const |
| Returns a constant reference to the vector-valued input port for applied generalized forces, and the vector will be added directly into tau (see System dynamics). | |
| const systems::InputPort< T > & | get_applied_spatial_force_input_port () const |
| Returns a constant reference to the input port for applying spatial forces to bodies in the plant. | |
| const systems::InputPort< T > & | get_geometry_query_input_port () const |
| Returns a constant reference to the input port used to perform geometric queries on a SceneGraph. | |
| const systems::OutputPort< T > & | get_state_output_port () const |
| Reports the multibody state x = [q, v] of the model as a vector-valued output port of size num_multibody_states(). | |
| const systems::OutputPort< T > & | get_state_output_port (ModelInstanceIndex model_instance) const |
| Reports the multibody state xᵢ = [qᵢ vᵢ] for the given model_instance i as a vector-valued output port of size num_multibody_states(model_instance). | |
| const systems::OutputPort< T > & | get_generalized_acceleration_output_port () const |
| Reports the generalized accelerations v̇ of the model as a vector-valued output port of size num_velocities(). | |
| const systems::OutputPort< T > & | get_generalized_acceleration_output_port (ModelInstanceIndex model_instance) const |
| Reports the generalized accelerations v̇ᵢ for the given model_instance i as a vector-valued output port of size num_velocities(model_instance). | |
| const systems::OutputPort< T > & | get_generalized_contact_forces_output_port (ModelInstanceIndex model_instance) const |
| Reports the generalized contact forces for the given model_instance as a vector-valued output port of size num_actuated_dofs(model_instance). | |
| const systems::OutputPort< T > & | get_reaction_forces_output_port () const |
| Reports joint reaction forces as an abstract-valued output port containing an std::vector<SpatialForce<T>> of size num_joints(). | |
| const systems::OutputPort< T > & | get_contact_results_output_port () const |
| Returns an abstract-valued output port containing a ContactResults. | |
| const systems::OutputPort< T > & | get_geometry_pose_output_port () const |
| Reports frames' poses of all non-world bodies in this plant as an abstract-valued output port containing a FramePoseVector<T>. | |
| const systems::OutputPort< T > & | get_deformable_body_configuration_output_port () const |
| Reports vertex positions (configurations), measured and expressed in the world frame, of the deformable bodies in this plant as an abstract-valued output port containing a GeometryConfigurationVector<T>. | |
Construction | |
To add modeling elements like bodies, joints, force elements, constraints, etc. to a MultibodyPlant, use one of the following construction methods. Once all modeling elements have been added, the Finalize() method must be called. A call to any construction method after a call to Finalize() causes an exception to be thrown. After calling Finalize(), you may invoke MultibodyPlant methods that perform computations. See Finalize() for details. | |
| MultibodyPlant (double time_step) | |
| This constructor creates a plant with a single "world" body. | |
| template<typename U> | |
| MultibodyPlant (const MultibodyPlant< U > &other) | |
| Scalar-converting copy constructor. See System Scalar Conversion. | |
| ~MultibodyPlant () override | |
| void | SetUseSampledOutputPorts (bool use_sampled_output_ports) |
| (Advanced) For a discrete-time plant, configures whether the output ports are sampled (the default) or live (opt-in). | |
| const RigidBody< T > & | AddRigidBody (const std::string &name, ModelInstanceIndex model_instance, const SpatialInertia< double > &M_BBo_B=SpatialInertia< double >::Zero()) |
| Creates a rigid body with the provided name and spatial inertia. | |
| const RigidBody< T > & | AddRigidBody (const std::string &name, const SpatialInertia< double > &M_BBo_B=SpatialInertia< double >::Zero()) |
| Creates a rigid body with the provided name and spatial inertia. | |
| template<template< typename > class FrameType> | |
| const FrameType< T > & | AddFrame (std::unique_ptr< FrameType< T > > frame) |
| This method adds a Frame of type FrameType<T>. | |
| template<template< typename Scalar > class JointType> | |
| const JointType< T > & | AddJoint (std::unique_ptr< JointType< T > > joint) |
| This method adds a Joint of type JointType between two bodies. | |
| template<template< typename > class JointType, typename... Args> | |
| const JointType< T > & | AddJoint (const std::string &name, const RigidBody< T > &parent, const std::optional< math::RigidTransform< double > > &X_PF, const RigidBody< T > &child, const std::optional< math::RigidTransform< double > > &X_BM, Args &&... args) |
| This method adds a Joint of type JointType between two bodies. | |
| void | RemoveJoint (const Joint< T > &joint) |
| Removes and deletes joint from this MultibodyPlant. | |
| const WeldJoint< T > & | WeldFrames (const Frame< T > &frame_on_parent_F, const Frame< T > &frame_on_child_M, const math::RigidTransform< double > &X_FM=math::RigidTransform< double >::Identity()) |
| Welds frame_on_parent_F and frame_on_child_M with relative pose X_FM. | |
| template<template< typename Scalar > class ForceElementType, typename... Args> | |
| const ForceElementType< T > & | AddForceElement (Args &&... args) |
| Adds a new force element model of type ForceElementType to this MultibodyPlant. | |
| const JointActuator< T > & | AddJointActuator (const std::string &name, const Joint< T > &joint, double effort_limit=std::numeric_limits< double >::infinity()) |
| Creates and adds a JointActuator model for an actuator acting on a given joint. | |
| void | RemoveJointActuator (const JointActuator< T > &actuator) |
| Removes and deletes actuator from this MultibodyPlant. | |
| void | RemoveAllJointActuatorEffortLimits () |
| Removes the effort limits on all joint actuators. | |
| ModelInstanceIndex | AddModelInstance (const std::string &name) |
| Creates a new model instance. | |
| void | RenameModelInstance (ModelInstanceIndex model_instance, const std::string &name) |
| Renames an existing model instance. | |
| void | SetBaseBodyJointType (BaseBodyJointType joint_type, std::optional< ModelInstanceIndex > model_instance={}) |
| Sets the type of joint to be used by Finalize() to connect any otherwise unconnected bodies to World. | |
| void | SetFuseWeldedLinks (bool fuse, std::optional< ModelInstanceIndex > model_instance={}) |
| (Internal use only for now) Controls whether Link (RigidBody) elements that are welded to each other are to be fused onto a single mobilized body (a "fused mobod") in the generated model. | |
| BaseBodyJointType | GetBaseBodyJointType (std::optional< ModelInstanceIndex > model_instance={}) const |
| Returns the currently-set choice for base body joint type, either for the global setting or for a specific model instance if provided. | |
| bool | GetFuseWeldedLinks (std::optional< ModelInstanceIndex > model_instance={}) const |
| (Internal use only for now) Returns the global or a model_instance setting for whether or not to fuse welded Link (RigidBody) elements. | |
| void | Finalize () |
| This method must be called after all elements in the model (joints, bodies, force elements, constraints, etc.) are added and before any computations are performed. | |
Constraints | |
Set of APIs to define constraints. To mention a few important examples, constraints can be used to couple the motion of joints, to create kinematic loops, or to weld bodies together. Currently constraints are only supported for discrete MultibodyPlant models and not for all discrete solvers, see get_discrete_contact_solver(). If the model contains constraints not supported by the discrete solver, the plant will throw an exception at Finalize() time. At this point the user has the option to select a contact model approximation that uses a solver that supports constraints, or to re-define the model so that such a constraint is not needed. A contact model approximation can be set with set_discrete_contact_approximation() or in the MultibodyPlantConfig. Each constraint is identified with a MultibodyConstraintId returned by the function used to add it (e.g. AddCouplerConstraint()). It is possible to recover constraint specification parameters for each constraint with various introspection functions (e.g. get_coupler_constraint_specs()). Each constraint has an "active" status that is set to true by default. Query a constraint's active status with GetConstraintActiveStatus() and set its active status with SetConstraintActiveStatus().
| |
| int | num_constraints () const |
| Returns the total number of constraints specified by the user. | |
| std::vector< MultibodyConstraintId > | GetConstraintIds () const |
| Returns a list of all constraint identifiers. | |
| int | num_coupler_constraints () const |
| Returns the total number of coupler constraints specified by the user. | |
| int | num_distance_constraints () const |
| Returns the total number of distance constraints specified by the user. | |
| int | num_ball_constraints () const |
| Returns the total number of ball constraints specified by the user. | |
| int | num_weld_constraints () const |
| Returns the total number of weld constraints specified by the user. | |
| int | num_tendon_constraints () const |
| Returns the total number of tendon constraints specified by the user. | |
| const internal::CouplerConstraintSpec & | get_coupler_constraint_specs (MultibodyConstraintId id) const |
| (Internal use only) Returns the coupler constraint specification corresponding to id | |
| const internal::BallConstraintSpec & | get_ball_constraint_specs (MultibodyConstraintId id) const |
| (Internal use only) Returns the ball constraint specification corresponding to id | |
| const internal::WeldConstraintSpec & | get_weld_constraint_specs (MultibodyConstraintId id) const |
| (Internal use only) Returns the weld constraint specification corresponding to id | |
| const internal::TendonConstraintSpec & | get_tendon_constraint_specs (MultibodyConstraintId id) const |
| (Internal use only) Returns the tendon constraint specification corresponding to id | |
| const std::map< MultibodyConstraintId, internal::CouplerConstraintSpec > & | get_coupler_constraint_specs () const |
| (Internal use only) Returns a reference to the all of the coupler constraints in this plant as a map from MultibodyConstraintId to CouplerConstraintSpec. | |
| const std::map< MultibodyConstraintId, internal::BallConstraintSpec > & | get_ball_constraint_specs () const |
| (Internal use only) Returns a reference to all of the ball constraints in this plant as a map from MultibodyConstraintId to BallConstraintSpec. | |
| const std::map< MultibodyConstraintId, internal::WeldConstraintSpec > & | get_weld_constraint_specs () const |
| (Internal use only) Returns a reference to the all of the weld constraints in this plant as a map from MultibodyConstraintId to WeldConstraintSpec. | |
| const std::map< MultibodyConstraintId, internal::TendonConstraintSpec > & | get_tendon_constraint_specs () const |
| (Internal use only) Returns a reference to the all of the tendon constraints in this plant as a map from MultibodyConstraintId to TendonConstraintSpec. | |
| bool | GetConstraintActiveStatus (const systems::Context< T > &context, MultibodyConstraintId id) const |
| Returns the active status of the constraint given by id in context. | |
| void | SetConstraintActiveStatus (systems::Context< T > *context, MultibodyConstraintId id, bool status) const |
| Sets the active status of the constraint given by id in context. | |
| MultibodyConstraintId | AddCouplerConstraint (const Joint< T > &joint0, const Joint< T > &joint1, double gear_ratio, double offset=0.0) |
| Defines a holonomic constraint between two single-dof joints joint0 and joint1 with positions q₀ and q₁, respectively, such that q₀ = ρ⋅q₁ + Δq, where ρ is the gear ratio and Δq is a fixed offset. | |
| MultibodyConstraintId | AddDistanceConstraint (const RigidBody< T > &body_A, const Vector3< double > &p_AP, const RigidBody< T > &body_B, const Vector3< double > &p_BQ, double distance, double stiffness=std::numeric_limits< double >::infinity(), double damping=0.0) |
| Defines a distance constraint between a point P on a body A and a point Q on a body B. | |
| const std::map< MultibodyConstraintId, DistanceConstraintParams > & | GetDefaultDistanceConstraintParams () const |
| Returns all default distance constraint parameters, as registered via AddDistanceConstraint(). | |
| const std::map< MultibodyConstraintId, DistanceConstraintParams > & | GetDistanceConstraintParams (const systems::Context< T > &context) const |
| Returns all distance constraint parameters currently stored in context. | |
| const DistanceConstraintParams & | GetDistanceConstraintParams (const systems::Context< T > &context, MultibodyConstraintId id) const |
| Returns a constant reference to the parameters for the distance constraint that corresponds to identifier id. | |
| void | SetDistanceConstraintParams (systems::Context< T > *context, MultibodyConstraintId id, DistanceConstraintParams params) const |
| Stores in context the parameters params for the distance constraint with identifier id. | |
| MultibodyConstraintId | AddBallConstraint (const RigidBody< T > &body_A, const Vector3< double > &p_AP, const RigidBody< T > &body_B, const std::optional< Vector3< double > > &p_BQ={}) |
| Defines a constraint such that point P affixed to body A is coincident at all times with point Q affixed to body B, effectively modeling a ball-and-socket joint. | |
| MultibodyConstraintId | AddWeldConstraint (const RigidBody< T > &body_A, const math::RigidTransform< double > &X_AP, const RigidBody< T > &body_B, const math::RigidTransform< double > &X_BQ) |
| Defines a constraint such that frame P affixed to body A is coincident at all times with frame Q affixed to body B, effectively modeling a weld joint. | |
| MultibodyConstraintId | AddTendonConstraint (std::vector< JointIndex > joints, std::vector< double > a, std::optional< double > offset, std::optional< double > lower_limit, std::optional< double > upper_limit, std::optional< double > stiffness, std::optional< double > damping) |
| Defines a set of unilateral constraints on the length of an abstract tendon defined as: | |
| void | RemoveConstraint (MultibodyConstraintId id) |
| Removes the constraint id from the plant. | |
Geometry | |
The following geometry methods provide a convenient means for associating geometries with bodies. Ultimately, the geometries are owned by SceneGraph. These methods do the work of registering the requested geometries with SceneGraph and maintaining a mapping between the body and the registered data. Particularly, SceneGraph knows nothing about the concepts inherent in the MultibodyPlant. These methods account for those differences as documented below. Geometry registration with rolesGeometries can be associated with bodies via the RegisterFooGeometry family of methods. In SceneGraph, geometries have roles. The RegisterCollisionGeometry() methods register geometry with SceneGraph and assign it the proximity role. The RegisterVisualGeometry() methods do the same, but assign the illustration and/or perception role, depending on how the API is exercised (see below). All geometry registration methods return a GeometryId GeometryId. This is how SceneGraph refers to the geometries. The properties of an individual geometry can be accessed with its id and geometry::SceneGraphInspector and geometry::QueryObject (for its state-dependent pose in world). Body frames and SceneGraph framesThe first time a geometry registration method is called on a particular body, that body's frame B is registered with SceneGraph. As SceneGraph knows nothing about bodies, in the SceneGraph domain, the frame is simply notated as F; this is merely an alias for the body frame. Thus, the pose of the geometry G in the SceneGraph frame F is the same as the pose of the geometry in the body frame B; X_FG = X_BG. The model instance index of the body is passed to the SceneGraph frame as its "frame group". This can be retrieved from the geometry::SceneGraphInspector::GetFrameGroup(FrameId) method. Given a GeometryId, SceneGraph cannot report what body it is affixed to. It can only report the SceneGraph alias frame F. But the following idiom can report the body: const MultibodyPlant<T>& plant = ...;
const SceneGraphInspector<T>& inspector = ...;
const GeometryId g_id = id_from_some_query;
const FrameId f_id = inspector.GetFrameId(g_id);
const RigidBody< T > * GetBodyFromFrameId(geometry::FrameId frame_id) const Given a geometry frame identifier, returns a pointer to the body associated with that id (nullptr if ... Definition multibody_plant.h:2491 See documentation of geometry::SceneGraphInspector on where to get an inspector. MultibodyPlant names vs. SceneGraph namesIn MultibodyPlant, frame names only have to be unique in a single model instance. However, SceneGraph knows nothing of model instances. So, to generate unique names for the corresponding frames in SceneGraph, when MultibodyPlant registers the corresponding SceneGraph frame, it is named with a "scoped name". This is a concatenation of [model instance name]::[body name]. Searching for a frame with just the name body name will fail. (See RigidBody::name() and GetModelInstanceName() for those values.) Geometry names get scoped in the same way. The name passed to a RegisterXXGeometry becomes the scoped name [model instance name]::[name] in SceneGraph. Registering visual rolesDrake has two visual roles: illustration and perception. Unless otherwise indicated, the RegisterVisualGeometry() APIs register the given geometry with both roles. One API allows specific control over which roles are assigned.
Furthermore, unless the ("label", "id") property has already been defined, the PerceptionProperties will be assigned that property with a geometry::RenderLabel whose value is equal to the body's index. | |
| geometry::SourceId | RegisterAsSourceForSceneGraph (geometry::SceneGraph< T > *scene_graph) |
| Registers this plant to serve as a source for an instance of SceneGraph. | |
| geometry::GeometryId | RegisterVisualGeometry (const RigidBody< T > &body, const math::RigidTransform< double > &X_BG, const geometry::Shape &shape, const std::string &name, const geometry::IllustrationProperties &properties) |
| Registers geometry in a SceneGraph with a given geometry::Shape to be used for visualization of a given body. | |
| geometry::GeometryId | RegisterVisualGeometry (const RigidBody< T > &body, std::unique_ptr< geometry::GeometryInstance > geometry_instance) |
| Registers the given geometry_instance in a SceneGraph to be used for visualization of a given body. | |
| geometry::GeometryId | RegisterVisualGeometry (const RigidBody< T > &body, const math::RigidTransform< double > &X_BG, const geometry::Shape &shape, const std::string &name, const Vector4< double > &diffuse_color) |
| Overload for visual geometry registration. | |
| geometry::GeometryId | RegisterVisualGeometry (const RigidBody< T > &body, const math::RigidTransform< double > &X_BG, const geometry::Shape &shape, const std::string &name) |
| Overload for visual geometry registration. | |
| const std::vector< geometry::GeometryId > & | GetVisualGeometriesForBody (const RigidBody< T > &body) const |
| Returns an array of GeometryId's identifying the different visual geometries for body previously registered with a SceneGraph. | |
| geometry::GeometryId | RegisterCollisionGeometry (const RigidBody< T > &body, const math::RigidTransform< double > &X_BG, const geometry::Shape &shape, const std::string &name, geometry::ProximityProperties properties) |
| Registers geometry in a SceneGraph with a given geometry::Shape to be used for the contact modeling of a given body. | |
| geometry::GeometryId | RegisterCollisionGeometry (const RigidBody< T > &body, const math::RigidTransform< double > &X_BG, const geometry::Shape &shape, const std::string &name, const CoulombFriction< double > &coulomb_friction) |
| Overload which specifies a single property: coulomb_friction. | |
| const std::vector< geometry::GeometryId > & | GetCollisionGeometriesForBody (const RigidBody< T > &body) const |
| Returns an array of GeometryId's identifying the different contact geometries for body previously registered with a SceneGraph. | |
| void | ExcludeCollisionGeometriesWithCollisionFilterGroupPair (const std::pair< std::string, geometry::GeometrySet > &collision_filter_group_a, const std::pair< std::string, geometry::GeometrySet > &collision_filter_group_b) |
| Excludes the collision geometries between two given collision filter groups. | |
| geometry::GeometrySet | CollectRegisteredGeometries (const std::vector< const RigidBody< T > * > &bodies) const |
| For each of the provided bodies, collects up all geometries that have been registered to that body. | |
| const RigidBody< T > * | GetBodyFromFrameId (geometry::FrameId frame_id) const |
| Given a geometry frame identifier, returns a pointer to the body associated with that id (nullptr if there is no such body). | |
| std::optional< geometry::FrameId > | GetBodyFrameIdIfExists (BodyIndex body_index) const |
| If the body with body_index belongs to the called plant, it returns the geometry::FrameId associated with it. | |
| geometry::FrameId | GetBodyFrameIdOrThrow (BodyIndex body_index) const |
| If the body with body_index belongs to the called plant, it returns the geometry::FrameId associated with it. | |
| const geometry::SceneGraphInspector< T > & | EvalSceneGraphInspector (const systems::Context< T > &context) const |
| Returns the inspector from the context for the SceneGraph associated with this plant, via this plant's "geometry_query" input port. | |
State accessors and mutators | |
The following state methods allow getting and setting the kinematic state variables [q; v], where q is the vector of generalized positions and v is the vector of generalized velocities. The state resides in a Context that is supplied as the first argument to every method.
There are also utilities for accessing and mutating portions of state or actuation arrays corresponding to just a single model instance. | |
| Eigen::VectorBlock< const VectorX< T > > | GetPositionsAndVelocities (const systems::Context< T > &context) const |
| Returns a const vector reference [q; v] to the generalized positions q and generalized velocities v in a given Context. | |
| VectorX< T > | GetPositionsAndVelocities (const systems::Context< T > &context, ModelInstanceIndex model_instance) const |
| Returns a vector [q; v] containing the generalized positions q and generalized velocities v of a specified model instance in a given Context. | |
| void | GetPositionsAndVelocities (const systems::Context< T > &context, ModelInstanceIndex model_instance, EigenPtr< VectorX< T > > qv_out) const |
| (Advanced) Populates output vector qv_out representing the generalized positions q and generalized velocities v of a specified model instance in a given Context. | |
| void | SetPositionsAndVelocities (systems::Context< T > *context, const Eigen::Ref< const VectorX< T > > &q_v) const |
| Sets generalized positions q and generalized velocities v in a given Context from a given vector [q; v]. | |
| void | SetPositionsAndVelocities (systems::Context< T > *context, ModelInstanceIndex model_instance, const Eigen::Ref< const VectorX< T > > &q_v) const |
| Sets generalized positions q and generalized velocities v from a given vector [q; v] for a specified model instance in a given Context. | |
| Eigen::VectorBlock< const VectorX< T > > | GetPositions (const systems::Context< T > &context) const |
| Returns a const vector reference to the vector of generalized positions q in a given Context. | |
| VectorX< T > | GetPositions (const systems::Context< T > &context, ModelInstanceIndex model_instance) const |
| Returns a vector containing the generalized positions q of a specified model instance in a given Context. | |
| void | GetPositions (const systems::Context< T > &context, ModelInstanceIndex model_instance, EigenPtr< VectorX< T > > q_out) const |
| (Advanced) Populates output vector q_out with the generalized positions q of a specified model instance in a given Context. | |
| void | SetPositions (systems::Context< T > *context, const Eigen::Ref< const VectorX< T > > &q) const |
| Sets the generalized positions q in a given Context from a given vector. | |
| void | SetPositions (systems::Context< T > *context, ModelInstanceIndex model_instance, const Eigen::Ref< const VectorX< T > > &q_instance) const |
| Sets the generalized positions q for a particular model instance in a given Context from a given vector. | |
| void | SetPositions (const systems::Context< T > &context, systems::State< T > *state, ModelInstanceIndex model_instance, const Eigen::Ref< const VectorX< T > > &q_instance) const |
| (Advanced) Sets the generalized positions q for a particular model instance in a given State from a given vector. | |
| VectorX< T > | GetDefaultPositions () const |
| Gets the default positions for the plant, which can be changed via SetDefaultPositions(). | |
| VectorX< T > | GetDefaultPositions (ModelInstanceIndex model_instance) const |
| Gets the default positions for the plant for a given model instance, which can be changed via SetDefaultPositions(). | |
| void | SetDefaultPositions (const Eigen::Ref< const Eigen::VectorXd > &q) |
| Sets the default positions for the plant. | |
| void | SetDefaultPositions (ModelInstanceIndex model_instance, const Eigen::Ref< const Eigen::VectorXd > &q_instance) |
| Sets the default positions for the model instance. | |
| Eigen::VectorBlock< const VectorX< T > > | GetVelocities (const systems::Context< T > &context) const |
| Returns a const vector reference to the generalized velocities v in a given Context. | |
| VectorX< T > | GetVelocities (const systems::Context< T > &context, ModelInstanceIndex model_instance) const |
| Returns a vector containing the generalized velocities v of a specified model instance in a given Context. | |
| void | GetVelocities (const systems::Context< T > &context, ModelInstanceIndex model_instance, EigenPtr< VectorX< T > > v_out) const |
| (Advanced) Populates output vector v_out with the generalized velocities v of a specified model instance in a given Context. | |
| void | SetVelocities (systems::Context< T > *context, const Eigen::Ref< const VectorX< T > > &v) const |
| Sets the generalized velocities v in a given Context from a given vector. | |
| void | SetVelocities (systems::Context< T > *context, ModelInstanceIndex model_instance, const Eigen::Ref< const VectorX< T > > &v_instance) const |
| Sets the generalized velocities v for a particular model instance in a given Context from a given vector. | |
| void | SetVelocities (const systems::Context< T > &context, systems::State< T > *state, ModelInstanceIndex model_instance, const Eigen::Ref< const VectorX< T > > &v_instance) const |
| (Advanced) Sets the generalized velocities v for a particular model instance in a given State from a given vector. | |
| void | SetDefaultState (const systems::Context< T > &context, systems::State< T > *state) const override |
| Sets state according to defaults set by the user for joints (e.g. | |
| void | SetRandomState (const systems::Context< T > &context, systems::State< T > *state, RandomGenerator *generator) const override |
| Assigns random values to all elements of the state, by drawing samples independently for each joint/free body (coming soon: and then solving a mathematical program to "project" these samples onto the registered system constraints). | |
| std::vector< std::string > | GetPositionNames (bool add_model_instance_prefix=true, bool always_add_suffix=true) const |
| Returns a list of string names corresponding to each element of the position vector. | |
| std::vector< std::string > | GetPositionNames (ModelInstanceIndex model_instance, bool add_model_instance_prefix=false, bool always_add_suffix=true) const |
| Returns a list of string names corresponding to each element of the position vector. | |
| std::vector< std::string > | GetVelocityNames (bool add_model_instance_prefix=true, bool always_add_suffix=true) const |
| Returns a list of string names corresponding to each element of the velocity vector. | |
| std::vector< std::string > | GetVelocityNames (ModelInstanceIndex model_instance, bool add_model_instance_prefix=false, bool always_add_suffix=true) const |
| Returns a list of string names corresponding to each element of the velocity vector. | |
| std::vector< std::string > | GetStateNames (bool add_model_instance_prefix=true) const |
| Returns a list of string names corresponding to each element of the multibody state vector. | |
| std::vector< std::string > | GetStateNames (ModelInstanceIndex model_instance, bool add_model_instance_prefix=false) const |
| Returns a list of string names corresponding to each element of the multibody state vector. | |
| std::vector< std::string > | GetActuatorNames (bool add_model_instance_prefix=true) const |
| Returns a list of string names corresponding to each element of the actuation vector. | |
| std::vector< std::string > | GetActuatorNames (ModelInstanceIndex model_instance, bool add_model_instance_prefix=false) const |
| Returns a list of string names corresponding to each element of the actuation vector. | |
| VectorX< T > | GetActuationFromArray (ModelInstanceIndex model_instance, const Eigen::Ref< const VectorX< T > > &u) const |
| Returns a vector of actuation values for model_instance from a vector u of actuation values for the entire plant model. | |
| void | SetActuationInArray (ModelInstanceIndex model_instance, const Eigen::Ref< const VectorX< T > > &u_instance, EigenPtr< VectorX< T > > u) const |
| Given actuation values u_instance for the actuators in model_instance, this function updates the actuation vector u for the entire plant model to which this actuator belongs to. | |
| VectorX< T > | GetPositionsFromArray (ModelInstanceIndex model_instance, const Eigen::Ref< const VectorX< T > > &q) const |
| Returns a vector of generalized positions for model_instance from a vector q_array of generalized positions for the entire model model. | |
| void | GetPositionsFromArray (ModelInstanceIndex model_instance, const Eigen::Ref< const VectorX< T > > &q, EigenPtr< VectorX< T > > q_out) const |
| (Advanced) Populates output vector q_out and with the generalized positions for model_instance from a vector q of generalized positions for the entire model. | |
| void | SetPositionsInArray (ModelInstanceIndex model_instance, const Eigen::Ref< const VectorX< T > > &q_instance, EigenPtr< VectorX< T > > q) const |
| Sets the vector of generalized positions for model_instance in q using q_instance, leaving all other elements in the array untouched. | |
| VectorX< T > | GetVelocitiesFromArray (ModelInstanceIndex model_instance, const Eigen::Ref< const VectorX< T > > &v) const |
| Returns a vector of generalized velocities for model_instance from a vector v of generalized velocities for the entire MultibodyPlant model. | |
| void | GetVelocitiesFromArray (ModelInstanceIndex model_instance, const Eigen::Ref< const VectorX< T > > &v, EigenPtr< VectorX< T > > v_out) const |
| (Advanced) Populates output vector v_out with the generalized velocities for model_instance from a vector v of generalized velocities for the entire model. | |
| void | SetVelocitiesInArray (ModelInstanceIndex model_instance, const Eigen::Ref< const VectorX< T > > &v_instance, EigenPtr< VectorX< T > > v) const |
| Sets the vector of generalized velocities for model_instance in v using v_instance, leaving all other elements in the array untouched. | |
Working with free and floating base bodies | |
In robotics it is natural to think of some bodies as "floating", in the sense that they may be posed independently of any other body. Manipulands (objects to be manipulated by a robot) are the most obvious example since they aren't connected to anything else. A mobile base or humanoid torso can also be posed freely, though other bodies will move along with them. MultibodyPlant recognizes floating bodies at Finalize() by the fact that they have no user-provided joint connecting them to any parent body. They are given six degrees of freedom relative to the World frame and referred to as floating base bodies. We use the term free body for any body that has six degrees of freedom relative to its parent. Floating base bodies are a special case of free bodies, with World as the assumed parent. The distinction is where the degrees of freedom come from: floating base bodies get theirs from Finalize(); all other free bodies get theirs from user-defined joints. The APIs below depend on that distinction. Those with "FreeBody" in their names work on all free bodies. Those with "FloatingBaseBody" only work on floating base bodies. To implement a floating base body at Finalize(), MultibodyPlant automatically adds a floating joint between that body's frame and the World frame. Prior to that there is no joint so we provide a pre-Finalize() API here to set the default pose of a floating base body in World. (See SetDefaultFloatingBaseBodyPose() below.) The default pose is used to initialize the floating joint's coordinates once that joint has been added. After Finalize(), you can use the Joint API by accessing the automatically-added floating joint (see below), or continue to use the APIs in this group. Post-Finalize() there are a few additional APIs that apply only to floating base bodies. For example, you can query whether a RigidBody is a floating base body with RigidBody::is_floating_base_body(), and can request a list of all floating base bodies with GetFloatingBaseBodies(). The relevant joint coordinate entries q and v in the multibody state vector can be obtained with RigidBody::floating_positions_start() and RigidBody::floating_velocities_start_in_v(). If there is a user-provided joint mobilizing a free body, use the Joint API as you would for any other joint. You can also use the Joint API to work with floating base bodies after Finalize(), by accessing the automatically-added floating joint. Use GetJointByName() with the name of the floating base body (see RigidBody::name()). (In the rare case that there is already some unrelated joint with that name, we prepend underscores to the joint's name until it is unique.) | |
| std::unordered_set< BodyIndex > | GetFloatingBaseBodies () const |
| Returns the set of body indices corresponding to the floating base bodies in the model, in no particular order. | |
| void | SetDefaultFloatingBaseBodyPose (const RigidBody< T > &body, const math::RigidTransform< double > &X_WB) |
| Provisionally records a default World pose for body, to be used in case body turns out to be a floating base body after Finalize(). | |
| math::RigidTransform< double > | GetDefaultFloatingBaseBodyPose (const RigidBody< T > &body) const |
| Gets the provisional default pose of body as set by SetDefaultFloatingBaseBodyPose(). | |
| void | SetFloatingBaseBodyPoseInWorldFrame (systems::Context< T > *context, const RigidBody< T > &body, const math::RigidTransform< T > &X_WB) const |
| Updates context to store the pose X_WB of a given floating base body B's body frame in the World frame W. | |
| void | SetFloatingBaseBodyPoseInAnchoredFrame (systems::Context< T > *context, const Frame< T > &frame_F, const RigidBody< T > &body, const math::RigidTransform< T > &X_FB) const |
| Updates context to store the World-frame pose of floating base body B, given its pose X_FB in an arbitrary anchored frame F. | |
| const RigidBody< T > & | GetUniqueFloatingBaseBodyOrThrow (ModelInstanceIndex model_instance) const |
| If there is a single base body in the model given by model_instance, and that body is a floating base body, returns that floating base body. | |
| bool | HasUniqueFloatingBaseBody (ModelInstanceIndex model_instance) const |
| Returns true if there is a single base body in the model given by model_instance, and that body is a floating base body. | |
| math::RigidTransform< T > | GetFreeBodyPose (const systems::Context< T > &context, const RigidBody< T > &body) const |
| For any free body's 6-dof joint, gets the pose X_JpJc of the child frame Jc in its parent frame Jp. | |
| void | SetFreeBodyPose (systems::Context< T > *context, const RigidBody< T > &body, const math::RigidTransform< T > &X_JpJc) const |
| For any free body's 6-dof joint, sets context to store the pose X_JpJc of child frame Jc in its parent frame Jp. | |
| void | SetFreeBodyPose (const systems::Context< T > &context, systems::State< T > *state, const RigidBody< T > &body, const math::RigidTransform< T > &X_JpJc) const |
| (Advanced) Variant of SetFreeBodyPose() that writes to a given state rather than directly to the Context. | |
| void | SetFreeBodySpatialVelocity (systems::Context< T > *context, const RigidBody< T > &body, const SpatialVelocity< T > &V_JpJc) const |
| For any free body's 6-dof joint, sets context to store the spatial velocity V_JpJc of child frame Jc in its parent frame Jp. | |
| void | SetFreeBodySpatialVelocity (const systems::Context< T > &context, systems::State< T > *state, const RigidBody< T > &body, const SpatialVelocity< T > &V_JpJc) const |
| (Advanced) Variant of SetFreeBodySpatialVelocity() that writes to a given state rather than directly to the Context. | |
| void | SetFreeBodyRandomTranslationDistribution (const RigidBody< T > &body, const Vector3< symbolic::Expression > &translation) |
| For any free body's 6-dof joint, sets the distribution used by SetRandomState() to populate the x-y-z translation of its child frame Jc with respect to its parent frame Jp. | |
| void | SetFreeBodyRandomRotationDistribution (const RigidBody< T > &body, const Eigen::Quaternion< symbolic::Expression > &rotation) |
| For any free body's 6-dof joint, sets the distribution used by SetRandomState() to populate the orientation of its child frame Jc with respect to its parent frame Jp, expressed as a quaternion. | |
| void | SetFreeBodyRandomRotationDistributionToUniform (const RigidBody< T > &body) |
| For any free body's 6-dof joint, sets the distribution used by SetRandomState() to populate the orientation of its child frame Jc with respect to its parent frame Jp using uniformly random rotations (expressed as a quaternion). | |
| void | SetFreeBodyRandomAnglesDistribution (const RigidBody< T > &body, const math::RollPitchYaw< symbolic::Expression > &angles) |
| For any free body's 6-dof joint, sets the distribution used by SetRandomState() to populate the orientation of its child frame Jc with respect to its parent frame Jp, expressed with roll-pitch-yaw angles. | |
Kinematic and dynamic computations | |
These methods return kinematic results for the state supplied in the given Context. Methods whose names being with Eval return a reference into the Context's cache, performing computation first only if the relevant state has changed. Methods beginning with Calc perform computation unconditionally and return a result without updating the cache. | |
| const math::RigidTransform< T > & | EvalBodyPoseInWorld (const systems::Context< T > &context, const RigidBody< T > &body_B) const |
| Evaluate the pose X_WB of a body B in the world frame W. | |
| const SpatialVelocity< T > & | EvalBodySpatialVelocityInWorld (const systems::Context< T > &context, const RigidBody< T > &body_B) const |
| Evaluates V_WB, body B's spatial velocity in the world frame W. | |
| const SpatialAcceleration< T > & | EvalBodySpatialAccelerationInWorld (const systems::Context< T > &context, const RigidBody< T > &body_B) const |
| Evaluates A_WB, body B's spatial acceleration in the world frame W. | |
| math::RigidTransform< T > | CalcRelativeTransform (const systems::Context< T > &context, const Frame< T > &frame_A, const Frame< T > &frame_B) const |
| Calculates the rigid transform (pose) X_AB relating frame A and frame B. | |
| math::RotationMatrix< T > | CalcRelativeRotationMatrix (const systems::Context< T > &context, const Frame< T > &frame_A, const Frame< T > &frame_B) const |
| Calculates the rotation matrix R_AB relating frame A and frame B. | |
| void | CalcPointsPositions (const systems::Context< T > &context, const Frame< T > &frame_B, const Eigen::Ref< const MatrixX< T > > &p_BQi, const Frame< T > &frame_A, EigenPtr< MatrixX< T > > p_AQi) const |
| Given the positions p_BQi for a set of points Qi measured and expressed in a frame B, this method computes the positions p_AQi(q) of each point Qi in the set as measured and expressed in another frame A, as a function of the generalized positions q of the model. | |
| void | CalcPointsVelocities (const systems::Context< T > &context, const Frame< T > &frame_B, const Eigen::Ref< const MatrixX< T > > &p_BQi, const Frame< T > &frame_A, const Frame< T > &frame_E, EigenPtr< MatrixX< T > > v_AQi_E) const |
| For a set of n points Qi (i = 0, ... n-1) that are regarded as fixed on a frame B, calculates the velocities v_AQi_E of Qi measured in a frame A and expressed in a frame E. | |
| T | CalcTotalMass (const systems::Context< T > &context) const |
| Calculates the total mass of all bodies in this MultibodyPlant. | |
| T | CalcTotalMass (const systems::Context< T > &context, const std::vector< ModelInstanceIndex > &model_instances) const |
| Calculates the total mass of all bodies contained in model_instances. | |
| Vector3< T > | CalcCenterOfMassPositionInWorld (const systems::Context< T > &context) const |
| Calculates the position vector from the world origin Wo to the center of mass of all bodies in this MultibodyPlant, expressed in the world frame W. | |
| Vector3< T > | CalcCenterOfMassPositionInWorld (const systems::Context< T > &context, const std::vector< ModelInstanceIndex > &model_instances) const |
| Calculates the position vector from the world origin Wo to the center of mass of all non-world bodies contained in model_instances, expressed in the world frame W. | |
| SpatialInertia< T > | CalcSpatialInertia (const systems::Context< T > &context, const Frame< T > &frame_F, const std::vector< BodyIndex > &body_indexes) const |
| Returns M_SFo_F, the spatial inertia of a set S of bodies about point Fo (the origin of a frame F), expressed in frame F. | |
| Vector3< T > | CalcCenterOfMassTranslationalVelocityInWorld (const systems::Context< T > &context) const |
| Calculates system center of mass translational velocity in world frame W. | |
| Vector3< T > | CalcCenterOfMassTranslationalAccelerationInWorld (const systems::Context< T > &context) const |
| For the system S contained in this MultibodyPlant, calculates Scm's translational acceleration in the world frame W expressed in W, where Scm is the center of mass of S. | |
| Vector3< T > | CalcCenterOfMassTranslationalAccelerationInWorld (const systems::Context< T > &context, const std::vector< ModelInstanceIndex > &model_instances) const |
| For the system S containing the selected model instances, calculates Scm's translational acceleration in the world frame W expressed in W, where Scm is the center of mass of S. | |
| Vector3< T > | CalcCenterOfMassTranslationalVelocityInWorld (const systems::Context< T > &context, const std::vector< ModelInstanceIndex > &model_instances) const |
| Calculates system center of mass translational velocity in world frame W. | |
| SpatialMomentum< T > | CalcSpatialMomentumInWorldAboutPoint (const systems::Context< T > &context, const Vector3< T > &p_WoP_W) const |
| This method returns the spatial momentum of this MultibodyPlant in the world frame W, about a designated point P, expressed in the world frame W. | |
| SpatialMomentum< T > | CalcSpatialMomentumInWorldAboutPoint (const systems::Context< T > &context, const std::vector< ModelInstanceIndex > &model_instances, const Vector3< T > &p_WoP_W) const |
| This method returns the spatial momentum of a set of model instances in the world frame W, about a designated point P, expressed in frame W. | |
| void | CalcSpatialAccelerationsFromVdot (const systems::Context< T > &context, const VectorX< T > &known_vdot, std::vector< SpatialAcceleration< T > > *A_WB_array) const |
| Given the state of this model in context and a known vector of generalized accelerations known_vdot, this method computes the spatial acceleration A_WB for each body as measured and expressed in the world frame W. | |
| VectorX< T > | CalcInverseDynamics (const systems::Context< T > &context, const VectorX< T > &known_vdot, const MultibodyForces< T > &external_forces) const |
| Given the state of this model in context and a known vector of generalized accelerations vdot, this method computes the set of generalized forces tau that would need to be applied in order to attain the specified generalized accelerations. | |
| void | CalcImplicitTimeDerivativesResidual (const systems::Context< T > &context, const systems::ContinuousState< T > &proposed_derivatives, EigenPtr< VectorX< T > > residual) const |
| MultibodyPlant implements the systems::System::CalcImplicitTimeDerivativesResidual method when the plant is modeled as a continuous-time system, returning one residual for each multibody state. | |
| void | CalcForceElementsContribution (const systems::Context< T > &context, MultibodyForces< T > *forces) const |
| Computes the combined force contribution of ForceElement objects in the model. | |
| VectorX< T > | CalcGravityGeneralizedForces (const systems::Context< T > &context) const |
| Computes the generalized forces tau_g(q) due to gravity as a function of the generalized positions q stored in the input context. | |
| void | CalcGeneralizedForces (const systems::Context< T > &context, const MultibodyForces< T > &forces, VectorX< T > *generalized_forces) const |
| Computes the generalized forces result of a set of MultibodyForces applied to this model. | |
| bool | IsVelocityEqualToQDot () const |
| Returns true iff the generalized velocity v is exactly the time derivative q̇ of the generalized coordinates q. | |
| void | MapVelocityToQDot (const systems::Context< T > &context, const Eigen::Ref< const VectorX< T > > &v, EigenPtr< VectorX< T > > qdot) const |
| Transforms generalized velocities v to time derivatives qdot of the generalized positions vector q (stored in context). | |
| void | MapQDotToVelocity (const systems::Context< T > &context, const Eigen::Ref< const VectorX< T > > &qdot, EigenPtr< VectorX< T > > v) const |
| Transforms the time derivative qdot of the generalized positions vector q (stored in context) to generalized velocities v. | |
| Eigen::SparseMatrix< T > | MakeVelocityToQDotMap (const systems::Context< T > &context) const |
| Returns the matrix N(q), which maps q̇ = N(q)⋅v, as described in MapVelocityToQDot(). | |
| Eigen::SparseMatrix< T > | MakeQDotToVelocityMap (const systems::Context< T > &context) const |
| Returns the matrix N⁺(q), which maps v = N⁺(q)⋅q̇, as described in MapQDotToVelocity(). | |
System matrix computations | |
Methods in this section compute and return various matrices that appear in the system equations of motion. For better performance, prefer to use direct computations where available rather than work with explicit matrices. See Kinematic and dynamics computations for available computations. For example, you can obtain the mass matrix, Coriolis, centripetal, and gyroscopic "bias" terms, and a variety of Jacobian and actuation matrices. | |
| void | CalcMassMatrixViaInverseDynamics (const systems::Context< T > &context, EigenPtr< MatrixX< T > > M) const |
| Computes the mass matrix M(q) of the model using a slow method (inverse dynamics). | |
| void | CalcMassMatrix (const systems::Context< T > &context, EigenPtr< MatrixX< T > > M) const |
| Efficiently computes the mass matrix M(q) of the model. | |
| MatrixX< double > | MakeStateSelectorMatrix (const std::vector< JointIndex > &user_to_joint_index_map) const |
| This method allows users to map the state of this model, x, into a vector of selected state xₛ with a given preferred ordering. | |
| MatrixX< double > | MakeActuatorSelectorMatrix (const std::vector< JointActuatorIndex > &user_to_actuator_index_map) const |
| This method allows user to map a vector uₛ containing the actuation for a set of selected actuators into the vector u containing the actuation values for this full model. | |
| MatrixX< T > | MakeActuationMatrix () const |
| This method creates an actuation matrix B mapping a vector of actuation values u into generalized forces tau_u = B * u, where B is a matrix of size nv x nu with nu equal to num_actuated_dofs() and nv equal to num_velocities(). | |
| Eigen::SparseMatrix< double > | MakeActuationMatrixPseudoinverse () const |
| Creates the pseudoinverse of the actuation matrix B directly (without requiring an explicit inverse calculation). | |
| MatrixX< double > | MakeActuatorSelectorMatrix (const std::vector< JointIndex > &user_to_joint_index_map) const |
| Alternative signature to build an actuation selector matrix Su such that u = Su⋅uₛ, where u is the vector of actuation values for the full model (see get_actuation_input_port()) and uₛ is a vector of actuation values for the actuators acting on the joints listed by user_to_joint_index_map. | |
Jacobian functions | |
Herein, a Jacobian is a matrix that contains the partial derivatives of a vector with respect to a list of scalars. The vector may be a position vector, translational velocity, angular velocity, or spatial velocity and the scalars may be the system's generalized positions q or "speeds" 𝑠 where 𝑠 is either q̇ (time-derivative of generalized positions) or v (generalized velocities). JAq_p_PQ denotes the Jacobian in a frame A of the position vector from point P to point Q with respect to the generalized positions q. It is calculated with CalcJacobianPositionVector(). J𝑠_w_AB denotes the angular velocity Jacobian in a frame A of a frame B with respect to "speeds" 𝑠. It is calculated with CalcJacobianAngularVelocity(). J𝑠_V_ABp denotes the spatial velocity Jacobian in a frame A of a point Bp of frame B with respect to "speeds" 𝑠. It is calculated with CalcJacobianSpatialVelocity(). J𝑠_v_ABp denotes the translational velocity Jacobian in a frame A of a point Bp of frame B with respect to "speeds" 𝑠. It is calculated with CalcJacobianTranslationalVelocity(). J𝑠_v_AScm_E denotes the translational velocity Jacobian in a frame A of a point Scm with respect to "speeds" 𝑠, where point Scm is the center of mass of a system S. It is calculated with CalcJacobianCenterOfMassTranslationalVelocity() | |
| const std::vector< Eigen::MatrixX< T > > & | EvalBlockSystemJacobian (const systems::Context< T > &context) const |
| (Internal use only) Returns the System Jacobian Jv_V_WB(q) in block form. | |
| Eigen::MatrixX< T > | CalcFullSystemJacobian (const systems::Context< T > &context) const |
| (Internal use only) Evaluates the block system Jacobian, then uses it to fill in an equivalent full matrix of size 6n x m where n is the number of mobilized bodies and m the number of generalized velocities (mobilities). | |
| void | CalcJacobianSpatialVelocity (const systems::Context< T > &context, JacobianWrtVariable with_respect_to, const Frame< T > &frame_B, const Eigen::Ref< const Vector3< T > > &p_BoBp_B, const Frame< T > &frame_A, const Frame< T > &frame_E, EigenPtr< MatrixX< T > > Js_V_ABp_E) const |
| For one point Bp fixed/welded to a frame B, calculates J𝑠_V_ABp, Bp's spatial velocity Jacobian in frame A with respect to "speeds" 𝑠. | |
| void | CalcSystemJacobianTransposeTimesF (const systems::Context< T > &context, std::vector< SpatialForce< T > > *F_Bo_W_array, EigenPtr< VectorX< T > > tau) const |
| (Advanced) Computes τ = Jᵀ⋅F, the transpose-times-vector product of the System Jacobian Jᵀ times a per-mobilized body spatial force F, in O(n) time (that is, without forming J). | |
| void | CalcJacobianAngularVelocity (const systems::Context< T > &context, const JacobianWrtVariable with_respect_to, const Frame< T > &frame_B, const Frame< T > &frame_A, const Frame< T > &frame_E, EigenPtr< Matrix3X< T > > Js_w_AB_E) const |
| Calculates J𝑠_w_AB, a frame B's angular velocity Jacobian in a frame A with respect to "speeds" 𝑠. | |
| void | CalcJacobianTranslationalVelocity (const systems::Context< T > &context, JacobianWrtVariable with_respect_to, const Frame< T > &frame_B, const Eigen::Ref< const Matrix3X< T > > &p_BoBi_B, const Frame< T > &frame_A, const Frame< T > &frame_E, EigenPtr< MatrixX< T > > Js_v_ABi_E) const |
| For each point Bi affixed/welded to a frame B, calculates J𝑠_v_ABi, Bi's translational velocity Jacobian in frame A with respect to "speeds" 𝑠. | |
| void | CalcJacobianPositionVector (const systems::Context< T > &context, const Frame< T > &frame_B, const Eigen::Ref< const Matrix3X< T > > &p_BoBi_B, const Frame< T > &frame_A, const Frame< T > &frame_E, EigenPtr< MatrixX< T > > Jq_p_AoBi_E) const |
| For each point Bi affixed/welded to a frame B, calculates Jq_p_AoBi, Bi's position vector Jacobian in frame A with respect to the generalized positions q ≜ [q₁ ... qₙ]ᵀ as. | |
| void | CalcJacobianCenterOfMassTranslationalVelocity (const systems::Context< T > &context, JacobianWrtVariable with_respect_to, const Frame< T > &frame_A, const Frame< T > &frame_E, EigenPtr< Matrix3X< T > > Js_v_AScm_E) const |
| Calculates J𝑠_v_AScm_E, point Scm's translational velocity Jacobian in frame A with respect to "speeds" 𝑠, expressed in frame E, where point Scm is the center of mass of the system S of all non-world bodies contained in this MultibodyPlant. | |
| void | CalcJacobianCenterOfMassTranslationalVelocity (const systems::Context< T > &context, const std::vector< ModelInstanceIndex > &model_instances, JacobianWrtVariable with_respect_to, const Frame< T > &frame_A, const Frame< T > &frame_E, EigenPtr< Matrix3X< T > > Js_v_AScm_E) const |
| Calculates J𝑠_v_AScm_E, point Scm's translational velocity Jacobian in frame A with respect to "speeds" 𝑠, expressed in frame E, where point Scm is the center of mass of the system S of all non-world bodies contained in model_instances. | |
Bias acceleration functions | |
The name a𝑠Bias_AP denotes a point P's bias translational acceleration with respect to "speeds" 𝑠 measured in a frame A, where 𝑠 is either q̇ (time-derivatives of generalized positions) or v (generalized velocities). a𝑠Bias_AP includes the terms in a_AP (P's translational acceleration in A) that depend on q, q̇, v, but not terms that depend on 𝑠̇, i.e., a𝑠Bias_AP = a_AP when 𝑠̇ = 0. The proof below starts with v_AP (point P's translational velocity in frame A) written in terms of J𝑠_v_AP (point P's translational velocity Jacobian in frame A for s). v_AP = J𝑠_v_AP ⋅ 𝑠 which upon vector differentiation in A gives a_AP = Ĵ𝑠_v_AP ⋅ 𝑠 + J𝑠_v_AP ⋅ 𝑠̇ setting 𝑠̇ = 0, gives a𝑠Bias_AP = Ĵ𝑠_v_AP ⋅ 𝑠 is quadratic in s. Note: Since Ĵ𝑠_v_AP (the time-derivative of J𝑠_v_AP in frame A) is linear in s, a𝑠Bias_AP = Ĵ𝑠_v_AP ⋅ 𝑠 is quadratic in 𝑠. Similarly, A𝑠Bias_AB denotes a frame B's bias spatial acceleration with respect to speeds 𝑠 measured in frame A. It can be written in terms of the time-derivative of J𝑠_V_AB (B's spatial velocity Jacobian in frame A for speeds 𝑠) as A𝑠Bias_AB = Ĵ𝑠_V_AB ⋅ 𝑠 is quadratic in s.
| |
| void | CalcBiasTerm (const systems::Context< T > &context, EigenPtr< VectorX< T > > Cv) const |
| Computes the bias term C(q, v) v containing Coriolis, centripetal, and gyroscopic effects in the multibody equations of motion: | |
| Matrix3X< T > | CalcBiasTranslationalAcceleration (const systems::Context< T > &context, JacobianWrtVariable with_respect_to, const Frame< T > &frame_B, const Eigen::Ref< const Matrix3X< T > > &p_BoBi_B, const Frame< T > &frame_A, const Frame< T > &frame_E) const |
| For each point Bi affixed/welded to a frame B, calculates a𝑠Bias_ABi, Bi's translational acceleration bias in frame A with respect to "speeds" 𝑠, expressed in frame E, where speeds 𝑠 is either q̇ or v. | |
| SpatialAcceleration< T > | CalcBiasSpatialAcceleration (const systems::Context< T > &context, JacobianWrtVariable with_respect_to, const Frame< T > &frame_B, const Eigen::Ref< const Vector3< T > > &p_BoBp_B, const Frame< T > &frame_A, const Frame< T > &frame_E) const |
| For one point Bp affixed/welded to a frame B, calculates A𝑠Bias_ABp, Bp's spatial acceleration bias in frame A with respect to "speeds" 𝑠, expressed in frame E, where speeds 𝑠 is either q̇ or v. | |
| Vector3< T > | CalcBiasCenterOfMassTranslationalAcceleration (const systems::Context< T > &context, JacobianWrtVariable with_respect_to, const Frame< T > &frame_A, const Frame< T > &frame_E) const |
| For the system S of all bodies other than the world body, calculates a𝑠Bias_AScm_E, Scm's translational acceleration bias in frame A with respect to "speeds" 𝑠, expressed in frame E, where Scm is the center of mass of S and speeds 𝑠 is either q̇ or v. | |
| Vector3< T > | CalcBiasCenterOfMassTranslationalAcceleration (const systems::Context< T > &context, const std::vector< ModelInstanceIndex > &model_instances, JacobianWrtVariable with_respect_to, const Frame< T > &frame_A, const Frame< T > &frame_E) const |
| For the system S containing the selected model instances, calculates a𝑠Bias_AScm_E, Scm's translational acceleration bias in frame A with respect to "speeds" 𝑠, expressed in frame E, where Scm is the center of mass of S and speeds 𝑠 is either q̇ or v. | |
Introspection | |
These methods allow a user to query whether a given multibody element is part of this plant's model. These queries can be performed at any time during the lifetime of a MultibodyPlant model, i.e. there is no restriction on whether they must be called before or after Finalize(). These queries can be performed while new multibody elements are being added to the model. These methods allow a user to retrieve a reference to a multibody element by its name. An exception is thrown if there is no element with the requested name. If the named element is present in more than one model instance and a model instance is not explicitly specified, std::logic_error is thrown. | |
| double | time_step () const |
| The time step (or period) used to model this plant as a discrete system with periodic updates. | |
| bool | is_finalized () const |
| Returns true if this MultibodyPlant was finalized with a call to Finalize(). | |
| bool | has_sampled_output_ports () const |
| (Advanced) If this plant is continuous (i.e., is_discrete() is false), returns false. | |
| const RigidBody< T > & | world_body () const |
| Returns a constant reference to the world body. | |
| const RigidBodyFrame< T > & | world_frame () const |
| Returns a constant reference to the world frame. | |
| int | num_bodies () const |
| Returns the number of RigidBody elements in the model, including the "world" RigidBody, which is always part of the model. | |
| bool | has_body (BodyIndex body_index) const |
| Returns true if plant has a rigid body with unique index body_index. | |
| const RigidBody< T > & | get_body (BodyIndex body_index) const |
| Returns a constant reference to the body with unique index body_index. | |
| bool | IsAnchored (const RigidBody< T > &body) const |
Returns true if body is anchored (i.e. | |
| bool | HasBodyNamed (std::string_view name) const |
| int | NumBodiesWithName (std::string_view name) const |
| bool | HasBodyNamed (std::string_view name, ModelInstanceIndex model_instance) const |
| const RigidBody< T > & | GetBodyByName (std::string_view name) const |
| Returns a constant reference to a body that is identified by the string name in this MultibodyPlant. | |
| const RigidBody< T > & | GetBodyByName (std::string_view name, ModelInstanceIndex model_instance) const |
Returns a constant reference to the body that is uniquely identified by the string name and model_instance in this MultibodyPlant. | |
| std::vector< BodyIndex > | GetBodyIndices (ModelInstanceIndex model_instance) const |
| Returns a list of body indices associated with model_instance. | |
| const RigidBody< T > & | GetRigidBodyByName (std::string_view name) const |
| Returns a constant reference to a rigid body that is identified by the string name in this model. | |
| const RigidBody< T > & | GetRigidBodyByName (std::string_view name, ModelInstanceIndex model_instance) const |
Returns a constant reference to the rigid body that is uniquely identified by the string name in model_instance. | |
| std::vector< const RigidBody< T > * > | GetBodiesWeldedTo (const RigidBody< T > &body) const |
| Returns all bodies that are transitively welded, or rigidly affixed, to body, per these two definitions: | |
| std::vector< BodyIndex > | GetBodiesKinematicallyAffectedBy (const std::vector< JointIndex > &joint_indexes) const |
| Returns all bodies whose kinematics are transitively affected by the given vector of Joints. | |
| int | num_joints () const |
| Returns the number of joints in the model. | |
| bool | has_joint (JointIndex joint_index) const |
| Returns true if plant has a joint with unique index joint_index. | |
| const Joint< T > & | get_joint (JointIndex joint_index) const |
| Returns a constant reference to the joint with unique index joint_index. | |
| bool | HasJointNamed (std::string_view name) const |
| bool | HasJointNamed (std::string_view name, ModelInstanceIndex model_instance) const |
| Joint< T > & | get_mutable_joint (JointIndex joint_index) |
| Returns a mutable reference to the joint with unique index joint_index. | |
| const std::vector< JointIndex > & | GetJointIndices () const |
| Returns a list of all joint indices. | |
| std::vector< JointIndex > | GetJointIndices (ModelInstanceIndex model_instance) const |
| Returns a list of joint indices associated with model_instance. | |
| const std::vector< JointActuatorIndex > & | GetJointActuatorIndices () const |
| Returns a list of all joint actuator indices. | |
| std::vector< JointActuatorIndex > | GetJointActuatorIndices (ModelInstanceIndex model_instance) const |
| Returns a list of joint actuator indices associated with model_instance. | |
| std::vector< JointIndex > | GetActuatedJointIndices (ModelInstanceIndex model_instance) const |
| Returns a list of actuated joint indices associated with model_instance. | |
| template<template< typename > class JointType = Joint> | |
| const JointType< T > & | GetJointByName (std::string_view name, std::optional< ModelInstanceIndex > model_instance=std::nullopt) const |
| Returns a constant reference to a joint that is identified by the string name in this MultibodyPlant. | |
| template<template< typename > class JointType = Joint> | |
| JointType< T > & | GetMutableJointByName (std::string_view name, std::optional< ModelInstanceIndex > model_instance=std::nullopt) |
| A version of GetJointByName that returns a mutable reference. | |
| int | num_frames () const |
| Returns the number of Frame objects in this model. | |
| const Frame< T > & | get_frame (FrameIndex frame_index) const |
| Returns a constant reference to the frame with unique index frame_index. | |
| bool | HasFrameNamed (std::string_view name) const |
| bool | HasFrameNamed (std::string_view name, ModelInstanceIndex model_instance) const |
| const Frame< T > & | GetFrameByName (std::string_view name) const |
| Returns a constant reference to a frame that is identified by the string name in this model. | |
| const Frame< T > & | GetFrameByName (std::string_view name, ModelInstanceIndex model_instance) const |
Returns a constant reference to the frame that is uniquely identified by the string name in model_instance. | |
| std::vector< FrameIndex > | GetFrameIndices (ModelInstanceIndex model_instance) const |
| Returns a list of frame indices associated with model_instance. | |
| int | num_actuators () const |
| Returns the number of joint actuators in the model. | |
| int | num_actuators (ModelInstanceIndex model_instance) const |
| Returns the number of actuators for a specific model instance. | |
| int | num_actuated_dofs () const |
| Returns the total number of actuated degrees of freedom. | |
| int | num_actuated_dofs (ModelInstanceIndex model_instance) const |
| Returns the total number of actuated degrees of freedom for a specific model instance. | |
| bool | has_joint_actuator (JointActuatorIndex actuator_index) const |
| Returns true if plant has a joint actuator with unique index actuator_index. | |
| const JointActuator< T > & | get_joint_actuator (JointActuatorIndex actuator_index) const |
| Returns a constant reference to the joint actuator with unique index actuator_index. | |
| JointActuator< T > & | get_mutable_joint_actuator (JointActuatorIndex actuator_index) |
| Returns a mutable reference to the joint actuator with unique index actuator_index. | |
| bool | HasJointActuatorNamed (std::string_view name) const |
| bool | HasJointActuatorNamed (std::string_view name, ModelInstanceIndex model_instance) const |
| const JointActuator< T > & | GetJointActuatorByName (std::string_view name) const |
| Returns a constant reference to an actuator that is identified by the string name in this MultibodyPlant. | |
| const JointActuator< T > & | GetJointActuatorByName (std::string_view name, ModelInstanceIndex model_instance) const |
Returns a constant reference to the actuator that is uniquely identified by the string name and model_instance in this MultibodyPlant. | |
| int | num_force_elements () const |
| Returns the number of ForceElement objects. | |
| const ForceElement< T > & | get_force_element (ForceElementIndex force_element_index) const |
| Returns a constant reference to the force element with unique index force_element_index. | |
| template<template< typename > class ForceElementType = ForceElement> | |
| const ForceElementType< T > & | GetForceElement (ForceElementIndex force_element_index) const |
| Returns a constant reference to a force element identified by its unique index in this MultibodyPlant. | |
| bool | is_gravity_enabled (ModelInstanceIndex model_instance) const |
| void | set_gravity_enabled (ModelInstanceIndex model_instance, bool is_enabled) |
| Sets is_gravity_enabled() for model_instance to is_enabled. | |
| const UniformGravityFieldElement< T > & | gravity_field () const |
| An accessor to the current gravity field. | |
| UniformGravityFieldElement< T > & | mutable_gravity_field () |
| A mutable accessor to the current gravity field. | |
| int | num_model_instances () const |
| Returns the number of model instances in the model. | |
| const std::string & | GetModelInstanceName (ModelInstanceIndex model_instance) const |
| Returns the name of a model_instance. | |
| bool | HasModelInstanceNamed (std::string_view name) const |
| ModelInstanceIndex | GetModelInstanceByName (std::string_view name) const |
| Returns the index to the model instance that is uniquely identified by the string name in this MultibodyPlant. | |
| std::string | GetTopologyGraphvizString () const |
| Returns a Graphviz string describing the topology of this plant. | |
| int | num_positions () const |
| Returns the size of the generalized position vector q for this model. | |
| int | num_positions (ModelInstanceIndex model_instance) const |
| Returns the size of the generalized position vector qᵢ for model instance i. | |
| int | num_velocities () const |
| Returns the size of the generalized velocity vector v for this model. | |
| int | num_velocities (ModelInstanceIndex model_instance) const |
| Returns the size of the generalized velocity vector vᵢ for model instance i. | |
| int | num_multibody_states () const |
| Returns the size of the multibody system state vector x = [q v]. | |
| int | num_multibody_states (ModelInstanceIndex model_instance) const |
| Returns the size of the multibody system state vector xᵢ = [qᵢ vᵢ] for model instance i. | |
| VectorX< double > | GetPositionLowerLimits () const |
| Returns a vector of size num_positions() containing the lower position limits for every generalized position coordinate. | |
| VectorX< double > | GetPositionUpperLimits () const |
| Upper limit analog of GetPositionLowerLimits(), where any unbounded or unspecified limits will be +infinity. | |
| VectorX< double > | GetVelocityLowerLimits () const |
| Returns a vector of size num_velocities() containing the lower velocity limits for every generalized velocity coordinate. | |
| VectorX< double > | GetVelocityUpperLimits () const |
| Upper limit analog of GetVelocitysLowerLimits(), where any unbounded or unspecified limits will be +infinity. | |
| VectorX< double > | GetAccelerationLowerLimits () const |
| Returns a vector of size num_velocities() containing the lower acceleration limits for every generalized velocity coordinate. | |
| VectorX< double > | GetAccelerationUpperLimits () const |
| Upper limit analog of GetAccelerationsLowerLimits(), where any unbounded or unspecified limits will be +infinity. | |
| VectorX< double > | GetEffortLowerLimits () const |
| Returns a vector of size num_actuated_dofs() containing the lower effort limits for every actuator. | |
| VectorX< double > | GetEffortUpperLimits () const |
| Returns a vector of size num_actuated_dofs() containing the upper effort limits for every actuator. | |
| ContactModel | get_contact_model () const |
| Returns the model used for contact. See documentation for ContactModel. | |
| int | num_visual_geometries () const |
| Returns the number of geometries registered for visualization. | |
| int | num_collision_geometries () const |
| Returns the number of geometries registered for contact modeling. | |
| std::optional< geometry::SourceId > | get_source_id () const |
| Returns the unique id identifying this plant as a source for a SceneGraph. | |
| bool | geometry_source_is_registered () const |
| Returns true if this MultibodyPlant was registered with a SceneGraph. | |
| geometry::SceneGraph< T > * | GetMutableSceneGraphPreFinalize () |
| (Internal use only) Returns a mutable pointer to the SceneGraph that this plant is registered as a source for. | |
| const internal::LinkJointGraph & | graph () const |
| (Internal use only) Provides access to the internal::LinkJointGraph. | |
Friends | |
| template<typename U> | |
| class | MultibodyPlant |
| class | MultibodyPlantTester |
| class | internal::MultibodyPlantDiscreteUpdateManagerAttorney< T > |
| class | internal::MultibodyPlantIcfAttorney< T > |
| class | internal::MultibodyPlantModelAttorney< T > |
Related Symbols | |
(Note that these are not member symbols.) | |
| template<typename T> | |
| AddMultibodyPlantSceneGraphResult< T > | AddMultibodyPlantSceneGraph (systems::DiagramBuilder< T > *builder, double time_step, std::unique_ptr< geometry::SceneGraph< T > > scene_graph=nullptr) |
| Makes a new MultibodyPlant with discrete update period time_step and adds it to a diagram builder together with the provided SceneGraph instance, connecting the geometry ports. | |
| template<typename T> | |
| AddMultibodyPlantSceneGraphResult< T > | AddMultibodyPlantSceneGraph (systems::DiagramBuilder< T > *builder, std::unique_ptr< MultibodyPlant< T > > plant, std::unique_ptr< geometry::SceneGraph< T > > scene_graph=nullptr) |
| Adds a MultibodyPlant and a SceneGraph instance to a diagram builder, connecting the geometry ports. | |
Contact modeling | |
Use methods in this section to choose the contact model and to provide parameters for that model. Currently Drake supports an advanced compliant model of continuous surface patches we call Hydroelastic contact and a compliant point contact model as a reliable fallback. Please refer to Modeling Compliant Contact for details. | |
| void | set_contact_model (ContactModel model) |
| Sets the contact model to be used by this MultibodyPlant, see ContactModel for available options. | |
| DiscreteContactSolver | get_discrete_contact_solver () const |
| Returns the contact solver type used for discrete MultibodyPlant models. | |
| void | set_discrete_contact_approximation (DiscreteContactApproximation approximation) |
| Sets the discrete contact model approximation. | |
| DiscreteContactApproximation | get_discrete_contact_approximation () const |
| void | set_sap_near_rigid_threshold (double near_rigid_threshold=MultibodyPlantConfig{}.sap_near_rigid_threshold) |
| Non-negative dimensionless number typically in the range [0.0, 1.0], though larger values are allowed even if uncommon. | |
| double | get_sap_near_rigid_threshold () const |
| void | set_contact_surface_representation (geometry::HydroelasticContactRepresentation representation) |
| Sets the representation of contact surfaces to be used by this MultibodyPlant. | |
| geometry::HydroelasticContactRepresentation | get_contact_surface_representation () const |
| Gets the current representation of contact surfaces used by this MultibodyPlant. | |
| void | set_adjacent_bodies_collision_filters (bool value) |
| Sets whether to apply collision filters to topologically adjacent bodies at Finalize() time. | |
| bool | get_adjacent_bodies_collision_filters () const |
| Returns whether to apply collision filters to topologically adjacent bodies at Finalize() time. | |
| void | SetDiscreteUpdateManager (std::unique_ptr< internal::DiscreteUpdateManager< T > > manager) |
| For use only by advanced developers wanting to try out their custom time stepping strategies, including contact resolution. | |
| const DeformableModel< T > & | deformable_model () const |
| Returns the DeformableModel owned by this plant. | |
| DeformableModel< T > & | mutable_deformable_model () |
| Returns a mutable reference to the DeformableModel owned by this plant. | |
| void | set_penetration_allowance (double penetration_allowance=MultibodyPlantConfig{}.penetration_allowance) |
| Sets a penetration allowance used to estimate the point contact stiffness and Hunt & Crossley dissipation parameters. | |
| double | get_contact_penalty_method_time_scale () const |
| Returns a time-scale estimate tc based on the requested penetration allowance δ set with set_penetration_allowance(). | |
| void | set_stiction_tolerance (double v_stiction=MultibodyPlantConfig{}.stiction_tolerance) |
| | |
| double | stiction_tolerance () const |
| static geometry::HydroelasticContactRepresentation | GetDefaultContactSurfaceRepresentation (double time_step) |
| Return the default value for contact representation, given the desired time step. | |
|
delete |
|
delete |
|
explicit |
This constructor creates a plant with a single "world" body.
Therefore, right after creation, num_bodies() returns one.
MultibodyPlant offers two different modalities to model mechanical systems in time. These are:
Currently the discrete model is preferred for simulation given its robustness and speed in problems with frictional contact. However this might change as we work towards developing better strategies to model contact. See Simulation of Multibody Systems with Frictional Contact for further details.
@param[in] time_step
Indicates whether `this` plant is modeled as a continuous system
(`time_step = 0`) or as a discrete system with periodic updates of
period `time_step > 0`. See @ref multibody_simulation for further
details.
@warning Currently the continuous modality with `time_step = 0` does not
support joint limits for simulation, these are ignored. %MultibodyPlant
prints a warning to console if joint limits are provided. If your
simulation requires joint limits currently you must use a discrete
%MultibodyPlant model.
@throws std::exception if `time_step` is negative.
|
explicit |
Scalar-converting copy constructor. See System Scalar Conversion.
|
override |
| MultibodyConstraintId AddBallConstraint | ( | const RigidBody< T > & | body_A, |
| const Vector3< double > & | p_AP, | ||
| const RigidBody< T > & | body_B, | ||
| const std::optional< Vector3< double > > & | p_BQ = {} ) |
Defines a constraint such that point P affixed to body A is coincident at all times with point Q affixed to body B, effectively modeling a ball-and-socket joint.
| [in] | body_A | RigidBody to which point P is rigidly attached. |
| [in] | p_AP | Position of point P in body A's frame. |
| [in] | body_B | RigidBody to which point Q is rigidly attached. |
| [in] | p_BQ | (optional) Position of point Q in body B's frame. If p_BQ is std::nullopt, then p_BQ will be computed so that the constraint is satisfied for the default configuration at Finalize() time; subsequent changes to the default configuration will not change the computed p_BQ. |
| std::exception | if bodies A and B are the same body. |
| std::exception | if the MultibodyPlant has already been finalized. |
| std::exception | if this MultibodyPlant's underlying contact solver is not SAP. (i.e. get_discrete_contact_solver() != DiscreteContactSolver::kSap) |
| MultibodyConstraintId AddCouplerConstraint | ( | const Joint< T > & | joint0, |
| const Joint< T > & | joint1, | ||
| double | gear_ratio, | ||
| double | offset = 0.0 ) |
Defines a holonomic constraint between two single-dof joints joint0 and joint1 with positions q₀ and q₁, respectively, such that q₀ = ρ⋅q₁ + Δq, where ρ is the gear ratio and Δq is a fixed offset.
The gear ratio can have units if the units of q₀ and q₁ are different. For instance, between a prismatic and a revolute joint the gear ratio will specify the "pitch" of the resulting mechanism. As defined, offset has units of q₀.
| if | joint0 and joint1 are not both single-dof joints. |
| std::exception | if the MultibodyPlant has already been finalized. |
| std::exception | if this MultibodyPlant's underlying contact solver is not SAP. (i.e. get_discrete_contact_solver() != DiscreteContactSolver::kSap) |
| MultibodyConstraintId AddDistanceConstraint | ( | const RigidBody< T > & | body_A, |
| const Vector3< double > & | p_AP, | ||
| const RigidBody< T > & | body_B, | ||
| const Vector3< double > & | p_BQ, | ||
| double | distance, | ||
| double | stiffness = std::numeric_limits< double >::infinity(), | ||
| double | damping = 0.0 ) |
Defines a distance constraint between a point P on a body A and a point Q on a body B.
This constraint can be compliant, modeling a spring with free length distance and given stiffness and damping parameters between points P and Q. For d = ‖p_PQ‖, then a compliant distance constraint models a spring with force along p_PQ given by:
f = −stiffness ⋅ d − damping ⋅ ḋ
| [in] | body_A | RigidBody to which point P is rigidly attached. |
| [in] | p_AP | Position of point P in body A's frame. |
| [in] | body_B | RigidBody to which point Q is rigidly attached. |
| [in] | p_BQ | Position of point Q in body B's frame. |
| [in] | distance | Fixed length of the distance constraint, in meters. It must be strictly positive. |
| [in] | stiffness | For modeling a spring with free length equal to distance, the stiffness parameter in N/m. Optional, with its default value being infinite to model a rigid massless rod of length distance connecting points A and B. |
| [in] | damping | For modeling a spring with free length equal to distance, damping parameter in N⋅s/m. Optional, with its default value being zero for a non-dissipative constraint. |
| std::exception | if bodies A and B are the same body. |
| std::exception | if distance is not strictly positive. |
| std::exception | if stiffness is not positive or zero. |
| std::exception | if damping is not positive or zero. |
| std::exception | if the MultibodyPlant has already been finalized. |
| std::exception | if this MultibodyPlant's underlying contact solver is not SAP. (i.e. get_discrete_contact_solver() != DiscreteContactSolver::kSap) |
| const ForceElementType< T > & AddForceElement | ( | Args &&... | args | ) |
Adds a new force element model of type ForceElementType to this MultibodyPlant.
The arguments to this method args are forwarded to ForceElementType's constructor.
| [in] | args | Zero or more parameters provided to the constructor of the new force element. It must be the case that ForceElementType<T>(args) is a valid constructor. |
| ForceElementType | The type of the ForceElement to add. As there is always a UniformGravityFieldElement present (accessible through gravity_field()), an exception will be thrown if this function is called to add another UniformGravityFieldElement. |
| const FrameType< T > & AddFrame | ( | std::unique_ptr< FrameType< T > > | frame | ) |
This method adds a Frame of type FrameType<T>.
For more information, please see the corresponding constructor of FrameType.
| FrameType | Template which will be instantiated on T. |
| frame | Unique pointer frame instance. |
| const JointType< T > & AddJoint | ( | const std::string & | name, |
| const RigidBody< T > & | parent, | ||
| const std::optional< math::RigidTransform< double > > & | X_PF, | ||
| const RigidBody< T > & | child, | ||
| const std::optional< math::RigidTransform< double > > & | X_BM, | ||
| Args &&... | args ) |
This method adds a Joint of type JointType between two bodies.
The two bodies connected by this Joint object are referred to as parent and child bodies. The parent/child ordering defines the sign conventions for the generalized coordinates and the coordinate ordering for multi-DOF joints.
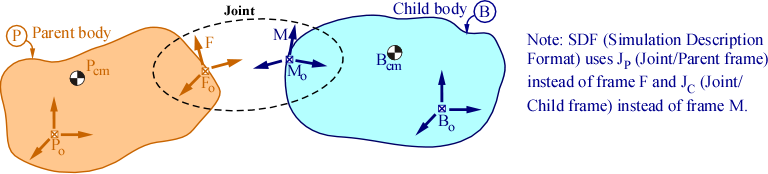
width=50%
Note: The previous figure also shows Pcm which is body P's center of mass and point Bcm which is body B's center of mass.
As explained in the Joint class's documentation, in Drake we define a frame F attached to the parent body P with pose X_PF and a frame M attached to the child body B with pose X_BM. This method helps creating a joint between two bodies with fixed poses X_PF and X_BM. Refer to the Joint class's documentation for more details.
| name | A string that uniquely identifies the new joint to be added to this model. A std::runtime_error is thrown if a joint named name already is part of the model. See HasJointNamed(), Joint::name(). | |
| [in] | parent | The parent body connected by the new joint. |
| [in] | X_PF | The fixed pose of frame F attached to the parent body, measured in the frame P of that body. X_PF is an optional parameter; empty curly braces {} imply that frame F is the same body frame P. If instead your intention is to make a frame F with pose X_PF equal to the identity pose, provide RigidTransform<double>::Identity() as your input. When non-nullopt, adds a FixedOffsetFrame named {name}_parent. |
| [in] | child | The child body connected by the new joint. |
| [in] | X_BM | The fixed pose of frame M attached to the child body, measured in the frame B of that body. X_BM is an optional parameter; empty curly braces {} imply that frame M is the same body frame B. If instead your intention is to make a frame M with pose X_BM equal to the identity pose, provide RigidTransform<double>::Identity() as your input. When non-nullopt, adds a FixedOffsetFrame named {name}_child. |
| [in] | args | Zero or more parameters provided to the constructor of the new joint. It must be the case that JointType<T>( const std::string&, const Frame<T>&, const Frame<T>&, args) is a valid constructor. |
| JointType | The type of the Joint to add. |
Example of usage:
| std::exception | if this MultibodyPlant already contains a joint with the given name. See HasJointNamed(), Joint::name(). |
| std::exception | if parent and child are the same body or if they are not both from this MultibodyPlant. |
| const JointType< T > & AddJoint | ( | std::unique_ptr< JointType< T > > | joint | ) |
| const JointActuator< T > & AddJointActuator | ( | const std::string & | name, |
| const Joint< T > & | joint, | ||
| double | effort_limit = std::numeric_limits< double >::infinity() ) |
Creates and adds a JointActuator model for an actuator acting on a given joint.
This method returns a constant reference to the actuator just added, which will remain valid for the lifetime of this plant.
| [in] | name | A string that uniquely identifies the new actuator to be added to this model. A std::runtime_error is thrown if an actuator with the same name already exists in the model. See HasJointActuatorNamed(). |
| [in] | joint | The Joint to be actuated by the new JointActuator. |
| [in] | effort_limit | The maximum effort for the actuator. It must be strictly positive, otherwise an std::exception is thrown. If +∞, the actuator has no limit, which is the default. The effort limit has physical units in accordance to the joint type it actuates. For instance, it will have units of N⋅m (torque) for revolute joints while it will have units of N (force) for prismatic joints. |
| std::exception | if joint.num_velocities() > 1 since for now we only support actuators for single dof joints. |
| ModelInstanceIndex AddModelInstance | ( | const std::string & | name | ) |
Creates a new model instance.
Returns the index for the model instance.
| [in] | name | A string that uniquely identifies the new instance to be added to this model. An exception is thrown if an instance with the same name already exists in the model. See HasModelInstanceNamed(). |
| const RigidBody< T > & AddRigidBody | ( | const std::string & | name, |
| const SpatialInertia< double > & | M_BBo_B = SpatialInertia<double>::Zero() ) |
Creates a rigid body with the provided name and spatial inertia.
This method returns a constant reference to the body just added, which will remain valid for the lifetime of this MultibodyPlant. The body will use the default model instance (more on model instances).
Example of usage:
| [in] | name | A string that identifies the new body to be added to this model. A std::runtime_error is thrown if a body named name already is part of the model in the default model instance. See HasBodyNamed(), RigidBody::name(). |
| [in] | M_BBo_B | The SpatialInertia of the new rigid body to be added to this MultibodyPlant, computed about the body frame origin Bo and expressed in the body frame B. When not provided, defaults to zero. |
| std::exception | if additional model instances have been created beyond the world and default instances. |
| const RigidBody< T > & AddRigidBody | ( | const std::string & | name, |
| ModelInstanceIndex | model_instance, | ||
| const SpatialInertia< double > & | M_BBo_B = SpatialInertia<double>::Zero() ) |
Creates a rigid body with the provided name and spatial inertia.
This method returns a constant reference to the body just added, which will remain valid for the lifetime of this MultibodyPlant.
Example of usage:
| [in] | name | A string that identifies the new body to be added to this model. A std::runtime_error is thrown if a body named name already is part of model_instance. See HasBodyNamed(), RigidBody::name(). |
| [in] | model_instance | A model instance index which this body is part of. |
| [in] | M_BBo_B | The SpatialInertia of the new rigid body to be added to this MultibodyPlant, computed about the body frame origin Bo and expressed in the body frame B. When not provided, defaults to zero. |
| MultibodyConstraintId AddTendonConstraint | ( | std::vector< JointIndex > | joints, |
| std::vector< double > | a, | ||
| std::optional< double > | offset, | ||
| std::optional< double > | lower_limit, | ||
| std::optional< double > | upper_limit, | ||
| std::optional< double > | stiffness, | ||
| std::optional< double > | damping ) |
Defines a set of unilateral constraints on the length of an abstract tendon defined as:
l(q) = aᵀ⋅q + offset ∈ ℝ
where q is the configuration of the model, a is a vector of coefficients, and offset a scalar offset. This constraint imposes:
lₗ ≤ l(q) ≤ lᵤ
where lₗ and lᵤ are lower and upper bounds, respectively. Both limits are not strictly required. At most one of lₗ or lᵤ may be infinite (−∞ for lₗ and ∞ for lᵤ), indicating no lower or upper limit, respectively.
For finite stiffness and damping, this constraint is modeled by compliant spring-like forces:
fₗ = −stiffness⋅(l - lₗ) − damping⋅dl(q)/dt
fᵤ = −stiffness⋅(lᵤ - l) + damping⋅dl(q)/dt
that act to keep the length within bounds. If the user provided stiffness is either omitted or set to ∞, this constraint is modeled as close to rigid as possible by the underlying solver.
| [in] | joints | Non-empty vector of single-dof joint indices where the configuration, qᵢ, of joints[i] corresponds to the entry a[i]. |
| [in] | a | Non-empty vector of coefficients where a[i] corresponds to the configuration, qᵢ, of joints[i]. |
| [in] | offset | (optional) Scalar length offset in either [m] or [rad]. If std::nullopt, it is set to 0. |
| [in] | lower_limit | (optional) Lower bound on l in either [m] or [rad]. If std::nullopt, it is set to −∞. |
| [in] | upper_limit | Upper bound on l in either [m] or [rad]. If std::nullopt, it is set to ∞. |
| [in] | stiffness | (optional) Constraint stiffness in either [N/m] or [N⋅m/rad]. If std::nullopt, its default value is set to ∞ to model a rigid constraint. |
| [in] | damping | (optional) Constraint damping in either [N⋅s/m] or [N⋅m⋅rad/s]. If std::nullopt, it is set to 0 to model a non-dissipative constraint. |
| std::exception | if the MultibodyPlant has already been finalized. |
| std::exception | if this MultibodyPlant's underlying contact solver is not SAP. (i.e. get_discrete_contact_solver() != DiscreteContactSolver::kSap). |
| MultibodyConstraintId AddWeldConstraint | ( | const RigidBody< T > & | body_A, |
| const math::RigidTransform< double > & | X_AP, | ||
| const RigidBody< T > & | body_B, | ||
| const math::RigidTransform< double > & | X_BQ ) |
Defines a constraint such that frame P affixed to body A is coincident at all times with frame Q affixed to body B, effectively modeling a weld joint.
| [in] | body_A | RigidBody to which frame P is rigidly attached. |
| [in] | X_AP | Pose of frame P in body A's frame. |
| [in] | body_B | RigidBody to which frame Q is rigidly attached. |
| [in] | X_BQ | Pose of frame Q in body B's frame. |
| std::exception | if bodies A and B are the same body. |
| std::exception | if the MultibodyPlant has already been finalized. |
| std::exception | if this MultibodyPlant's underlying contact solver is not SAP. (i.e. get_discrete_contact_solver() != DiscreteContactSolver::kSap) |
| Vector3< T > CalcBiasCenterOfMassTranslationalAcceleration | ( | const systems::Context< T > & | context, |
| const std::vector< ModelInstanceIndex > & | model_instances, | ||
| JacobianWrtVariable | with_respect_to, | ||
| const Frame< T > & | frame_A, | ||
| const Frame< T > & | frame_E ) const |
For the system S containing the selected model instances, calculates a𝑠Bias_AScm_E, Scm's translational acceleration bias in frame A with respect to "speeds" 𝑠, expressed in frame E, where Scm is the center of mass of S and speeds 𝑠 is either q̇ or v.
| [in] | context | Contains the state of the multibody system. |
| [in] | model_instances | Vector of selected model instances. If a model instance is repeated in the vector (unusual), it is only counted once. |
| [in] | with_respect_to | Enum equal to JacobianWrtVariable::kQDot or JacobianWrtVariable::kV, indicating whether the accceleration bias is with respect to 𝑠 = q̇ or 𝑠 = v. Currently, an exception is thrown if with_respect_to is JacobianWrtVariable::kQDot. |
| [in] | frame_A | The frame in which a𝑠Bias_AScm is measured. |
| [in] | frame_E | The frame in which a𝑠Bias_AScm is expressed on output. |
| std::exception | if this has no body except world_body(). |
| std::exception | if mₛ ≤ 0, where mₛ is the mass of system S. |
| std::exception | if with_respect_to is JacobianWrtVariable::kQDot. |
| Vector3< T > CalcBiasCenterOfMassTranslationalAcceleration | ( | const systems::Context< T > & | context, |
| JacobianWrtVariable | with_respect_to, | ||
| const Frame< T > & | frame_A, | ||
| const Frame< T > & | frame_E ) const |
For the system S of all bodies other than the world body, calculates a𝑠Bias_AScm_E, Scm's translational acceleration bias in frame A with respect to "speeds" 𝑠, expressed in frame E, where Scm is the center of mass of S and speeds 𝑠 is either q̇ or v.
| [in] | context | Contains the state of the multibody system. |
| [in] | with_respect_to | Enum equal to JacobianWrtVariable::kQDot or JacobianWrtVariable::kV, indicating whether the accceleration bias is with respect to 𝑠 = q̇ or 𝑠 = v. Currently, an exception is thrown if with_respect_to is JacobianWrtVariable::kQDot. |
| [in] | frame_A | The frame in which a𝑠Bias_AScm is measured. |
| [in] | frame_E | The frame in which a𝑠Bias_AScm is expressed on output. |
| std::exception | if this has no body except world_body(). |
| std::exception | if mₛ ≤ 0, where mₛ is the mass of system S. |
| std::exception | if with_respect_to is JacobianWrtVariable::kQDot. |
| SpatialAcceleration< T > CalcBiasSpatialAcceleration | ( | const systems::Context< T > & | context, |
| JacobianWrtVariable | with_respect_to, | ||
| const Frame< T > & | frame_B, | ||
| const Eigen::Ref< const Vector3< T > > & | p_BoBp_B, | ||
| const Frame< T > & | frame_A, | ||
| const Frame< T > & | frame_E ) const |
For one point Bp affixed/welded to a frame B, calculates A𝑠Bias_ABp, Bp's spatial acceleration bias in frame A with respect to "speeds" 𝑠, expressed in frame E, where speeds 𝑠 is either q̇ or v.
| [in] | context | Contains the state of the multibody system. |
| [in] | with_respect_to | Enum equal to JacobianWrtVariable::kQDot or JacobianWrtVariable::kV, indicating whether the spatial accceleration bias is with respect to 𝑠 = q̇ or 𝑠 = v. Currently, an exception is thrown if with_respect_to is JacobianWrtVariable::kQDot. |
| [in] | frame_B | The frame on which point Bp is affixed/welded. |
| [in] | p_BoBp_B | Position vector from Bo (frame_B's origin) to point Bp (regarded as affixed/welded to B), expressed in frame_B. |
| [in] | frame_A | The frame in which A𝑠Bias_ABp is measured. |
| [in] | frame_E | The frame in which A𝑠Bias_ABp is expressed on output. |
| std::exception | if with_respect_to is JacobianWrtVariable::kQDot. |
| void CalcBiasTerm | ( | const systems::Context< T > & | context, |
| EigenPtr< VectorX< T > > | Cv ) const |
Computes the bias term C(q, v) v containing Coriolis, centripetal, and gyroscopic effects in the multibody equations of motion:
M(q) v̇ + C(q, v) v = tau_app + ∑ (Jv_V_WBᵀ(q) ⋅ Fapp_Bo_W)
where M(q) is the multibody model's mass matrix (including rigid body mass properties and reflected inertias) and tau_app is a vector of applied generalized forces. The last term is a summation over all bodies of the dot-product of Fapp_Bo_W (applied spatial force on body B at Bo) with Jv_V_WB(q) (B's spatial Jacobian in world W with respect to generalized velocities v). Note: B's spatial velocity in W can be written V_WB = Jv_V_WB * v.
| [in] | context | Contains the state of the multibody system, including the generalized positions q and the generalized velocities v. |
| [out] | Cv | On output, Cv will contain the product C(q, v)v. It must be a valid (non-null) pointer to a column vector in ℛⁿ with n the number of generalized velocities (num_velocities()) of the model. This method aborts if Cv is nullptr or if it does not have the proper size. |
| Matrix3X< T > CalcBiasTranslationalAcceleration | ( | const systems::Context< T > & | context, |
| JacobianWrtVariable | with_respect_to, | ||
| const Frame< T > & | frame_B, | ||
| const Eigen::Ref< const Matrix3X< T > > & | p_BoBi_B, | ||
| const Frame< T > & | frame_A, | ||
| const Frame< T > & | frame_E ) const |
For each point Bi affixed/welded to a frame B, calculates a𝑠Bias_ABi, Bi's translational acceleration bias in frame A with respect to "speeds" 𝑠, expressed in frame E, where speeds 𝑠 is either q̇ or v.
| [in] | context | Contains the state of the multibody system. |
| [in] | with_respect_to | Enum equal to JacobianWrtVariable::kQDot or JacobianWrtVariable::kV, indicating whether the translational acceleration bias is with respect to 𝑠 = q̇ or 𝑠 = v. Currently, an exception is thrown if with_respect_to is JacobianWrtVariable::kQDot. |
| [in] | frame_B | The frame on which points Bi are affixed/welded. |
| [in] | p_BoBi_B | A position vector or list of p position vectors from Bo (frame_B's origin) to points Bi (regarded as affixed to B), where each position vector is expressed in frame_B. Each column in the 3 x p matrix p_BoBi_B corresponds to a position vector. |
| [in] | frame_A | The frame in which a𝑠Bias_ABi is measured. |
| [in] | frame_E | The frame in which a𝑠Bias_ABi is expressed on output. |
| std::exception | if with_respect_to is JacobianWrtVariable::kQDot. |
| Vector3< T > CalcCenterOfMassPositionInWorld | ( | const systems::Context< T > & | context | ) | const |
Calculates the position vector from the world origin Wo to the center of mass of all bodies in this MultibodyPlant, expressed in the world frame W.
| [in] | context | Contains the state of the model. |
| p_WoScm_W | position vector from Wo to Scm expressed in world frame W, where Scm is the center of mass of the system S stored by this plant. |
| std::exception | if this has no body except world_body(). |
| std::exception | if mₛ ≤ 0 (where mₛ is the mass of system S). |
| Vector3< T > CalcCenterOfMassPositionInWorld | ( | const systems::Context< T > & | context, |
| const std::vector< ModelInstanceIndex > & | model_instances ) const |
Calculates the position vector from the world origin Wo to the center of mass of all non-world bodies contained in model_instances, expressed in the world frame W.
| [in] | context | Contains the state of the model. |
| [in] | model_instances | Vector of selected model instances. If a model instance is repeated in the vector (unusual), it is only counted once. |
| p_WoScm_W | position vector from world origin Wo to Scm expressed in the world frame W, where Scm is the center of mass of the system S of non-world bodies contained in model_instances. |
| std::exception | if model_instances is empty or only has world body. |
| std::exception | if mₛ ≤ 0 (where mₛ is the mass of system S). |
| Vector3< T > CalcCenterOfMassTranslationalAccelerationInWorld | ( | const systems::Context< T > & | context | ) | const |
For the system S contained in this MultibodyPlant, calculates Scm's translational acceleration in the world frame W expressed in W, where Scm is the center of mass of S.
| [in] | context | The context contains the state of the model. |
| a_WScm_W | Scm's translational acceleration in the world frame W expressed in the world frame W. |
| std::exception | if this has no body except world_body(). |
| std::exception | if mₛ ≤ 0, where mₛ is the mass of system S. |
| Vector3< T > CalcCenterOfMassTranslationalAccelerationInWorld | ( | const systems::Context< T > & | context, |
| const std::vector< ModelInstanceIndex > & | model_instances ) const |
For the system S containing the selected model instances, calculates Scm's translational acceleration in the world frame W expressed in W, where Scm is the center of mass of S.
| [in] | context | The context contains the state of the model. |
| [in] | model_instances | Vector of selected model instances. If a model instance is repeated in the vector (unusual), it is only counted once. |
| a_WScm_W | Scm's translational acceleration in the world frame W expressed in the world frame W. |
| std::exception | if model_instances is empty or only has world body. |
| std::exception | if mₛ ≤ 0, where mₛ is the mass of system S. |
| Vector3< T > CalcCenterOfMassTranslationalVelocityInWorld | ( | const systems::Context< T > & | context | ) | const |
Calculates system center of mass translational velocity in world frame W.
| [in] | context | The context contains the state of the model. |
| v_WScm_W | Scm's translational velocity in frame W, expressed in W, where Scm is the center of mass of the system S stored by this plant. |
| std::exception | if this has no body except world_body(). |
| std::exception | if mₛ ≤ 0 (where mₛ is the mass of system S). |
| Vector3< T > CalcCenterOfMassTranslationalVelocityInWorld | ( | const systems::Context< T > & | context, |
| const std::vector< ModelInstanceIndex > & | model_instances ) const |
Calculates system center of mass translational velocity in world frame W.
| [in] | context | The context contains the state of the model. |
| [in] | model_instances | Vector of selected model instances. If a model instance is repeated in the vector (unusual), it is only counted once. |
| v_WScm_W | Scm's translational velocity in frame W, expressed in W, where Scm is the center of mass of the system S of non-world bodies contained in model_instances. |
| std::exception | if model_instances is empty or only has world body. |
| std::exception | if mₛ ≤ 0 (where mₛ is the mass of system S). |
| void CalcForceElementsContribution | ( | const systems::Context< T > & | context, |
| MultibodyForces< T > * | forces ) const |
Computes the combined force contribution of ForceElement objects in the model.
A ForceElement can apply forces as a spatial force per body or as generalized forces, depending on the ForceElement model. ForceElement contributions are a function of the state and time only. The output from this method can immediately be used as input to CalcInverseDynamics() to include the effect of applied forces by force elements.
| [in] | context | The context containing the state of this model. |
| [out] | forces | A pointer to a valid, non nullptr, multibody forces object. On output forces will store the forces exerted by all the ForceElement objects in the model. |
| std::exception | if forces is null or not compatible with this model, per MultibodyForces::CheckInvariants(). |
| Eigen::MatrixX< T > CalcFullSystemJacobian | ( | const systems::Context< T > & | context | ) | const |
(Internal use only) Evaluates the block system Jacobian, then uses it to fill in an equivalent full matrix of size 6n x m where n is the number of mobilized bodies and m the number of generalized velocities (mobilities).
Each mobilized body generates a 6 x m strip of the Jacobian (6 rows) and those are ordered by MobodIndex. Note that World is the 0th mobilized body so to keep the numbering consistent the first 6 rows of the Jacobian correspond to the World Mobod (and are thus all zero).
This is most useful for testing; it is more efficient to use EvalBlockSystemJacobian() and to work with the individual blocks.
| void CalcGeneralizedForces | ( | const systems::Context< T > & | context, |
| const MultibodyForces< T > & | forces, | ||
| VectorX< T > * | generalized_forces ) const |
Computes the generalized forces result of a set of MultibodyForces applied to this model.
MultibodyForces stores applied forces as both generalized forces τ and spatial forces F on each body, refer to documentation in MultibodyForces for details. Users of MultibodyForces will use MultibodyForces::mutable_generalized_forces() to mutate the stored generalized forces directly and will use RigidBody::AddInForceInWorld() to append spatial forces.
For a given set of forces stored as MultibodyForces, this method will compute the total generalized forces on this model. More precisely, if J_WBo is the Jacobian (with respect to velocities) for this model, including all bodies, then this method computes:
τᵣₑₛᵤₗₜ = τ + J_WBo⋅F
| [in] | context | Context that stores the state of the model. |
| [in] | forces | Set of multibody forces, including both generalized forces and per-body spatial forces. |
| [out] | generalized_forces | The total generalized forces on the model that would result from applying forces. In other words, forces can be replaced by the equivalent generalized_forces. On output, generalized_forces is resized to num_velocities(). |
| std::exception | if forces is null or not compatible with this model. |
| std::exception | if generalized_forces is not a valid non-null pointer. |
| VectorX< T > CalcGravityGeneralizedForces | ( | const systems::Context< T > & | context | ) | const |
Computes the generalized forces tau_g(q) due to gravity as a function of the generalized positions q stored in the input context.
The vector of generalized forces due to gravity tau_g(q) is defined such that it appears on the right hand side of the equations of motion together with any other generalized forces, like so:
Mv̇ + C(q, v)v = tau_g(q) + tau_app
where tau_app includes any other generalized forces applied on the system.
| [in] | context | The context storing the state of the model. |
| void CalcImplicitTimeDerivativesResidual | ( | const systems::Context< T > & | context, |
| const systems::ContinuousState< T > & | proposed_derivatives, | ||
| EigenPtr< VectorX< T > > | residual ) const |
MultibodyPlant implements the systems::System::CalcImplicitTimeDerivativesResidual method when the plant is modeled as a continuous-time system, returning one residual for each multibody state.
In particular, the first num_positions() residuals are given by
q̇_proposed - N(q)⋅v
and the final num_velocities() residuals are given by
CalcInverseDynamics(context, v_proposed)
including all actuator and applied forces.
| VectorX< T > CalcInverseDynamics | ( | const systems::Context< T > & | context, |
| const VectorX< T > & | known_vdot, | ||
| const MultibodyForces< T > & | external_forces ) const |
Given the state of this model in context and a known vector of generalized accelerations vdot, this method computes the set of generalized forces tau that would need to be applied in order to attain the specified generalized accelerations.
Mathematically, this method computes:
tau = M(q)v̇ + C(q, v)v - tau_app - ∑ J_WBᵀ(q) Fapp_Bo_W
where M(q) is the model's mass matrix (including rigid body mass properties and reflected inertias), C(q, v)v is the bias term for Coriolis and gyroscopic effects and tau_app consists of a vector of applied generalized forces. The last term is a summation over all bodies in the model where Fapp_Bo_W is an applied spatial force on body B at Bo which gets projected into the space of generalized forces with the transpose of Jv_V_WB(q) (where Jv_V_WB is B's spatial velocity Jacobian in W with respect to generalized velocities v). Note: B's spatial velocity in W can be written as V_WB = Jv_V_WB * v.
This method does not compute explicit expressions for the mass matrix nor for the bias term, which would be of at least O(n²) complexity, but it implements an O(n) Newton-Euler recursive algorithm, where n is the number of bodies in the model. The explicit formation of the mass matrix M(q) would require the calculation of O(n²) entries while explicitly forming the product C(q, v) * v could require up to O(n³) operations (see [Featherstone 1987, §4]), depending on the implementation. The recursive Newton-Euler algorithm is the most efficient currently known general method for solving inverse dynamics [Featherstone 2008].
| [in] | context | The context containing the state of the model. |
| [in] | known_vdot | A vector with the known generalized accelerations vdot for the full model. Use the provided Joint APIs in order to access entries into this array. |
| [in] | external_forces | A set of forces to be applied to the system either as body spatial forces Fapp_Bo_W or generalized forces tau_app, see MultibodyForces for details. |
| void CalcJacobianAngularVelocity | ( | const systems::Context< T > & | context, |
| const JacobianWrtVariable | with_respect_to, | ||
| const Frame< T > & | frame_B, | ||
| const Frame< T > & | frame_A, | ||
| const Frame< T > & | frame_E, | ||
| EigenPtr< Matrix3X< T > > | Js_w_AB_E ) const |
Calculates J𝑠_w_AB, a frame B's angular velocity Jacobian in a frame A with respect to "speeds" 𝑠.
J𝑠_w_AB ≜ [ ∂(w_AB)/∂𝑠₁, ... ∂(w_AB)/∂𝑠ₙ ] (n is j or k)
w_AB = J𝑠_w_AB ⋅ 𝑠 w_AB is linear in 𝑠 ≜ [𝑠₁ ... 𝑠ₙ]ᵀ
w_AB is B's angular velocity in frame A and "speeds" 𝑠 is either q̇ ≜ [q̇₁ ... q̇ⱼ]ᵀ (time-derivatives of j generalized positions) or v ≜ [v₁ ... vₖ]ᵀ (k generalized velocities).
| [in] | context | The state of the multibody system. |
| [in] | with_respect_to | Enum equal to JacobianWrtVariable::kQDot or JacobianWrtVariable::kV, indicating whether the Jacobian J𝑠_w_AB is partial derivatives with respect to 𝑠 = q̇ (time-derivatives of generalized positions) or with respect to 𝑠 = v (generalized velocities). |
| [in] | frame_B | The frame B in w_AB (B's angular velocity in A). |
| [in] | frame_A | The frame A in w_AB (B's angular velocity in A). |
| [in] | frame_E | The frame in which w_AB is expressed on input and the frame in which the Jacobian J𝑠_w_AB is expressed on output. |
| [out] | Js_w_AB_E | Frame B's angular velocity Jacobian in frame A with respect to speeds 𝑠 (which is either q̇ or v), expressed in frame E. The Jacobian is a function of only generalized positions q (which are pulled from the context). The previous definition shows J𝑠_w_AB_E is a matrix of size 3 x n, where n is the number of elements in 𝑠. |
| std::exception | if J𝑠_w_AB_E is nullptr or not of size 3 x n. |
| void CalcJacobianCenterOfMassTranslationalVelocity | ( | const systems::Context< T > & | context, |
| const std::vector< ModelInstanceIndex > & | model_instances, | ||
| JacobianWrtVariable | with_respect_to, | ||
| const Frame< T > & | frame_A, | ||
| const Frame< T > & | frame_E, | ||
| EigenPtr< Matrix3X< T > > | Js_v_AScm_E ) const |
Calculates J𝑠_v_AScm_E, point Scm's translational velocity Jacobian in frame A with respect to "speeds" 𝑠, expressed in frame E, where point Scm is the center of mass of the system S of all non-world bodies contained in model_instances.
| [in] | context | contains the state of the model. |
| [in] | model_instances | Vector of selected model instances. If a model instance is repeated in the vector (unusual), it is only counted once. |
| [in] | with_respect_to | Enum equal to JacobianWrtVariable::kQDot or JacobianWrtVariable::kV, indicating whether the Jacobian J𝑠_v_AScm_E is partial derivatives with respect to 𝑠 = q̇ (time-derivatives of generalized positions) or with respect to 𝑠 = v (generalized velocities). |
| [in] | frame_A | The frame in which the translational velocity v_AScm and its Jacobian J𝑠_v_AScm are measured. |
| [in] | frame_E | The frame in which the Jacobian J𝑠_v_AScm is expressed on output. |
| [out] | Js_v_AScm_E | Point Scm's translational velocity Jacobian in frame A with respect to speeds 𝑠 (𝑠 = q̇ or 𝑠 = v), expressed in frame E. J𝑠_v_AScm_E is a 3 x n matrix, where n is the number of elements in 𝑠. The Jacobian is a function of only generalized positions q (which are pulled from the context). |
| std::exception | if mₛ ≤ 0 (where mₛ is the mass of all non-world bodies contained in model_instances). |
| std::exception | if model_instances is empty or only has world body. |
| void CalcJacobianCenterOfMassTranslationalVelocity | ( | const systems::Context< T > & | context, |
| JacobianWrtVariable | with_respect_to, | ||
| const Frame< T > & | frame_A, | ||
| const Frame< T > & | frame_E, | ||
| EigenPtr< Matrix3X< T > > | Js_v_AScm_E ) const |
Calculates J𝑠_v_AScm_E, point Scm's translational velocity Jacobian in frame A with respect to "speeds" 𝑠, expressed in frame E, where point Scm is the center of mass of the system S of all non-world bodies contained in this MultibodyPlant.
| [in] | context | contains the state of the model. |
| [in] | with_respect_to | Enum equal to JacobianWrtVariable::kQDot or JacobianWrtVariable::kV, indicating whether the Jacobian J𝑠_v_AScm_E is partial derivatives with respect to 𝑠 = q̇ (time-derivatives of generalized positions) or with respect to 𝑠 = v (generalized velocities). |
| [in] | frame_A | The frame in which the translational velocity v_AScm and its Jacobian J𝑠_v_AScm are measured. |
| [in] | frame_E | The frame in which the Jacobian J𝑠_v_AScm is expressed on output. |
| [out] | Js_v_AScm_E | Point Scm's translational velocity Jacobian in frame A with respect to speeds 𝑠 (𝑠 = q̇ or 𝑠 = v), expressed in frame E. J𝑠_v_AScm_E is a 3 x n matrix, where n is the number of elements in 𝑠. The Jacobian is a function of only generalized positions q (which are pulled from the context). |
| std::exception | if Scm does not exist, which occurs if there are no massive bodies in MultibodyPlant (except world_body()). |
| std::exception | if mₛ ≤ 0 (where mₛ is the mass of all non-world bodies contained in this MultibodyPlant). |
| void CalcJacobianPositionVector | ( | const systems::Context< T > & | context, |
| const Frame< T > & | frame_B, | ||
| const Eigen::Ref< const Matrix3X< T > > & | p_BoBi_B, | ||
| const Frame< T > & | frame_A, | ||
| const Frame< T > & | frame_E, | ||
| EigenPtr< MatrixX< T > > | Jq_p_AoBi_E ) const |
For each point Bi affixed/welded to a frame B, calculates Jq_p_AoBi, Bi's position vector Jacobian in frame A with respect to the generalized positions q ≜ [q₁ ... qₙ]ᵀ as.
Jq_p_AoBi ≜ [ ᴬ∂(p_AoBi)/∂q₁, ... ᴬ∂(p_AoBi)/∂qₙ ]
where p_AoBi is Bi's position vector from point Ao (frame A's origin) and ᴬ∂(p_AoBi)/∂qᵣ denotes the partial derivative in frame A of p_AoBi with respect to the generalized position qᵣ, where qᵣ is one of q₁ ... qₙ.
| [in] | context | The state of the multibody system. |
| [in] | frame_B | The frame on which point Bi is affixed/welded. |
| [in] | p_BoBi_B | A position vector or list of k position vectors from Bo (frame_B's origin) to points Bi (Bi is regarded as affixed to B), where each position vector is expressed in frame_B. |
| [in] | frame_A | The frame in which partial derivatives are calculated and the frame in which point Ao is affixed. |
| [in] | frame_E | The frame in which the Jacobian Jq_p_AoBi is expressed on output. |
| [out] | Jq_p_AoBi_E | Point Bi's position vector Jacobian in frame A with generalized positions q, expressed in frame E. Jq_p_AoBi_E is a 3*k x n matrix, where k is the number of points Bi and n is the number of elements in q. The Jacobian is a function of only generalized positions q (which are pulled from the context). |
| std::exception | if Jq_p_AoBi_E is nullptr or not sized 3*k x n. |
[∂(v_ABi)/∂q̇₁, ... ∂(v_ABi)/∂q̇ₙ] = [ᴬ∂(p_AoBi)/∂q₁, ... ᴬ∂(p_AoBi)/∂qₙ]
| void CalcJacobianSpatialVelocity | ( | const systems::Context< T > & | context, |
| JacobianWrtVariable | with_respect_to, | ||
| const Frame< T > & | frame_B, | ||
| const Eigen::Ref< const Vector3< T > > & | p_BoBp_B, | ||
| const Frame< T > & | frame_A, | ||
| const Frame< T > & | frame_E, | ||
| EigenPtr< MatrixX< T > > | Js_V_ABp_E ) const |
For one point Bp fixed/welded to a frame B, calculates J𝑠_V_ABp, Bp's spatial velocity Jacobian in frame A with respect to "speeds" 𝑠.
J𝑠_V_ABp ≜ [ ∂(V_ABp)/∂𝑠₁, ... ∂(V_ABp)/∂𝑠ₙ ] (n is j or k)
V_ABp = J𝑠_V_ABp ⋅ 𝑠 V_ABp is linear in 𝑠 ≜ [𝑠₁ ... 𝑠ₙ]ᵀ
V_ABp is Bp's spatial velocity in frame A and "speeds" 𝑠 is either q̇ ≜ [q̇₁ ... q̇ⱼ]ᵀ (time-derivatives of j generalized positions) or v ≜ [v₁ ... vₖ]ᵀ (k generalized velocities).
| [in] | context | The state of the multibody system. |
| [in] | with_respect_to | Enum equal to JacobianWrtVariable::kQDot or JacobianWrtVariable::kV, indicating whether the Jacobian J𝑠_V_ABp is partial derivatives with respect to 𝑠 = q̇ (time-derivatives of generalized positions) or with respect to 𝑠 = v (generalized velocities). |
| [in] | frame_B | The frame on which point Bp is fixed/welded. |
| [in] | p_BoBp_B | A position vector from Bo (frame_B's origin) to point Bp (regarded as fixed/welded to B), expressed in frame_B. |
| [in] | frame_A | The frame that measures v_ABp (Bp's velocity in A). Note: It is natural to wonder why there is no parameter p_AoAp_A (similar to the parameter p_BoBp_B for frame_B). There is no need for p_AoAp_A because Bp's velocity in A is defined as the derivative in frame A of Bp's position vector from any point fixed to A. |
| [in] | frame_E | The frame in which v_ABp is expressed on input and the frame in which the Jacobian J𝑠_V_ABp is expressed on output. |
| [out] | Js_V_ABp_E | Point Bp's spatial velocity Jacobian in frame A with respect to speeds 𝑠 (which is either q̇ or v), expressed in frame E. J𝑠_V_ABp_E is a 6 x n matrix, where n is the number of elements in 𝑠. The Jacobian is a function of only generalized positions q (which are pulled from the context). |
J𝑠_w_AB_E = J𝑠_V_ABp_E.topRows<3>();
J𝑠_v_ABp_E = J𝑠_V_ABp_E.bottomRows<3>();
| std::exception | if J𝑠_V_ABp_E is nullptr or not sized 6 x n. |
| void CalcJacobianTranslationalVelocity | ( | const systems::Context< T > & | context, |
| JacobianWrtVariable | with_respect_to, | ||
| const Frame< T > & | frame_B, | ||
| const Eigen::Ref< const Matrix3X< T > > & | p_BoBi_B, | ||
| const Frame< T > & | frame_A, | ||
| const Frame< T > & | frame_E, | ||
| EigenPtr< MatrixX< T > > | Js_v_ABi_E ) const |
For each point Bi affixed/welded to a frame B, calculates J𝑠_v_ABi, Bi's translational velocity Jacobian in frame A with respect to "speeds" 𝑠.
J𝑠_v_ABi ≜ [ ∂(v_ABi)/∂𝑠₁, ... ∂(v_ABi)/∂𝑠ₙ ] (n is j or k)
v_ABi = J𝑠_v_ABi ⋅ 𝑠 v_ABi is linear in 𝑠 ≜ [𝑠₁ ... 𝑠ₙ]ᵀ
v_ABi is Bi's translational velocity in frame A and "speeds" 𝑠 is either q̇ ≜ [q̇₁ ... q̇ⱼ]ᵀ (time-derivatives of j generalized positions) or v ≜ [v₁ ... vₖ]ᵀ (k generalized velocities).
| [in] | context | The state of the multibody system. |
| [in] | with_respect_to | Enum equal to JacobianWrtVariable::kQDot or JacobianWrtVariable::kV, indicating whether the Jacobian J𝑠_v_ABi is partial derivatives with respect to 𝑠 = q̇ (time-derivatives of generalized positions) or with respect to 𝑠 = v (generalized velocities). |
| [in] | frame_B | The frame on which point Bi is affixed/welded. |
| [in] | p_BoBi_B | A position vector or list of p position vectors from Bo (frame_B's origin) to points Bi (regarded as affixed to B), where each position vector is expressed in frame_B. |
| [in] | frame_A | The frame that measures v_ABi (Bi's velocity in A). Note: It is natural to wonder why there is no parameter p_AoAi_A (similar to the parameter p_BoBi_B for frame_B). There is no need for p_AoAi_A because Bi's velocity in A is defined as the derivative in frame A of Bi's position vector from any point affixed to A. |
| [in] | frame_E | The frame in which v_ABi is expressed on input and the frame in which the Jacobian J𝑠_v_ABi is expressed on output. |
| [out] | Js_v_ABi_E | Point Bi's velocity Jacobian in frame A with respect to speeds 𝑠 (which is either q̇ or v), expressed in frame E. J𝑠_v_ABi_E is a 3*p x n matrix, where p is the number of points Bi and n is the number of elements in 𝑠. The Jacobian is a function of only generalized positions q (which are pulled from the context). |
| std::exception | if J𝑠_v_ABi_E is nullptr or not sized 3*p x n. |
[∂(v_ABi)/∂q̇₁, ... ∂(v_ABi)/∂q̇ⱼ] = [∂(p_AoBi)/∂q₁, ... ∂(p_AoBi)/∂qⱼ]Note: Each partial derivative of p_AoBi is taken in frame A.
| void CalcMassMatrix | ( | const systems::Context< T > & | context, |
| EigenPtr< MatrixX< T > > | M ) const |
Efficiently computes the mass matrix M(q) of the model.
The generalized positions q are taken from the given context. M includes the mass properties of rigid bodies and reflected inertias as provided with JointActuator specifications.
This method employs the Composite Body Algorithm, which we believe to be the fastest O(n²) algorithm to compute the mass matrix of a multibody system.
| [in] | context | The Context containing the state of the model from which generalized coordinates q are extracted. |
| [out] | M | A pointer to a square matrix in ℛⁿˣⁿ with n the number of generalized velocities (num_velocities()) of the model. Although symmetric, the matrix is filled in completely on return. |
| void CalcMassMatrixViaInverseDynamics | ( | const systems::Context< T > & | context, |
| EigenPtr< MatrixX< T > > | M ) const |
Computes the mass matrix M(q) of the model using a slow method (inverse dynamics).
The generalized positions q are taken from the given context. M includes the mass properties of rigid bodies and reflected inertias as provided with JointActuator specifications.
Use CalcMassMatrix() for a faster implementation using the Composite Body Algorithm.
| [in] | context | The Context containing the state of the model from which generalized coordinates q are extracted. |
| [out] | M | A pointer to a square matrix in ℛⁿˣⁿ with n the number of generalized velocities (num_velocities()) of the model. Although symmetric, the matrix is filled in completely on return. |
The algorithm used to build M(q) consists in computing one column of M(q) at a time using inverse dynamics. The result from inverse dynamics, with no applied forces, is the vector of generalized forces:
tau = M(q)v̇ + C(q, v)v
where q and v are the generalized positions and velocities, respectively. When v = 0 the Coriolis and gyroscopic forces term C(q, v)v is zero. Therefore the i-th column of M(q) can be obtained performing inverse dynamics with an acceleration vector v̇ = eᵢ, with eᵢ the standard (or natural) basis of ℛⁿ with n the number of generalized velocities. We write this as:
M.ᵢ(q) = M(q) * e_i
where M.ᵢ(q) (notice the dot for the rows index) denotes the i-th column in M(q).
| void CalcPointsPositions | ( | const systems::Context< T > & | context, |
| const Frame< T > & | frame_B, | ||
| const Eigen::Ref< const MatrixX< T > > & | p_BQi, | ||
| const Frame< T > & | frame_A, | ||
| EigenPtr< MatrixX< T > > | p_AQi ) const |
Given the positions p_BQi for a set of points Qi measured and expressed in a frame B, this method computes the positions p_AQi(q) of each point Qi in the set as measured and expressed in another frame A, as a function of the generalized positions q of the model.
Example of usage: Given two points Q0 and Q1 that are fixed to a frame B, the code below calculates their positions from the world frame origin, expressed in the world frame W.
| [in] | context | The context containing the state of the model. It stores the generalized positions q of the model. |
| [in] | frame_B | The frame B in which the positions p_BQi of a set of points Qi are given. |
| [in] | p_BQi | The input positions of each point Qi in frame B. p_BQi ∈ ℝ³ˣⁿ with n the number of points in the set. Each column of p_BQi corresponds to a vector in ℝ³ holding the position of one of the points in the set as measured and expressed in frame B. Each column of p_BQi is a position vector associated with one point Qi, and the number of columns in p_BQi is the number n of points. |
| [in] | frame_A | The frame A in which it is desired to compute the positions p_AQi of each point Qi in the set. |
| [out] | p_AQi | The output positions of each point Qi now computed as measured and expressed in frame A. The output p_AQi must have the same size as the input p_BQi or otherwise this method aborts. That is p_AQi must be in ℝ³ˣⁿ. Each column of p_AQi is a position vector associated with one point Qi, and the number of columns in p_BQi is the number n of points. |
| void CalcPointsVelocities | ( | const systems::Context< T > & | context, |
| const Frame< T > & | frame_B, | ||
| const Eigen::Ref< const MatrixX< T > > & | p_BQi, | ||
| const Frame< T > & | frame_A, | ||
| const Frame< T > & | frame_E, | ||
| EigenPtr< MatrixX< T > > | v_AQi_E ) const |
For a set of n points Qi (i = 0, ... n-1) that are regarded as fixed on a frame B, calculates the velocities v_AQi_E of Qi measured in a frame A and expressed in a frame E.
Example of usage: Given two points Q0 and Q1 that are fixed to a frame B, the code below calculates their velocities measured and expressed in the world frame W.
| [in] | context | Contains the state of the multibody system, including the generalized positions q and the generalized velocities v. |
| [in] | frame_B | The frame B in which each point Qi is fixed and whose frame origin Bo is the starting point for position vectors in p_BQi. frame_B is also the expressed-in-frame for position vectors p_BQi. |
| [in] | p_BQi | Position vectors from Bo (frame B's origin) to each point Qi (i = 0, ... n-1), expressed in frame B. Each column of p_BQi is a position vector associated with one point Qi, and the number of columns in p_BQi is the number n of points. |
| [in] | frame_A | The frame in which the velocities are to be measured. |
| [in] | frame_E | The frame in which the velocities are to be expressed. |
| [out] | v_AQi_E | The velocities of each point Qi (i = 0, ... n-1) measured in frame A and expressed in frame E. Each column of v_AQi_E is a translational velocity vector associated with one point Qi, and the number of columns in v_AQi_E is the number n of points. |
| std::exception | if p_BQi and v_AQi_E do not have three rows (are not 3 element vectors) or do not have the same number (n > 0) of columns. |
| math::RotationMatrix< T > CalcRelativeRotationMatrix | ( | const systems::Context< T > & | context, |
| const Frame< T > & | frame_A, | ||
| const Frame< T > & | frame_B ) const |
Calculates the rotation matrix R_AB relating frame A and frame B.
| [in] | context | The state of the multibody system, which includes the system's generalized positions q. Note: R_AB is a function of q. |
| [in] | frame_A | The frame A designated in the rigid transform R_AB. |
| [in] | frame_B | The frame G designated in the rigid transform R_AB. |
| R_AB | The RigidTransform relating frame A and frame B. |
| math::RigidTransform< T > CalcRelativeTransform | ( | const systems::Context< T > & | context, |
| const Frame< T > & | frame_A, | ||
| const Frame< T > & | frame_B ) const |
Calculates the rigid transform (pose) X_AB relating frame A and frame B.
| [in] | context | The state of the multibody system, which includes the system's generalized positions q. Note: X_AB is a function of q. |
| [in] | frame_A | The frame A designated in the rigid transform X_AB. |
| [in] | frame_B | The frame G designated in the rigid transform X_AB. |
| X_AB | The RigidTransform relating frame A and frame B. |
| void CalcSpatialAccelerationsFromVdot | ( | const systems::Context< T > & | context, |
| const VectorX< T > & | known_vdot, | ||
| std::vector< SpatialAcceleration< T > > * | A_WB_array ) const |
Given the state of this model in context and a known vector of generalized accelerations known_vdot, this method computes the spatial acceleration A_WB for each body as measured and expressed in the world frame W.
| [in] | context | The context containing the state of this model. |
| [in] | known_vdot | A vector with the generalized accelerations for the full model. |
| [out] | A_WB_array | A pointer to a valid, non nullptr, vector of spatial accelerations containing the spatial acceleration A_WB for each body. It must be of size equal to the number of bodies in the model. On output, entries will be ordered by BodyIndex. |
| std::exception | if A_WB_array is not of size num_bodies(). |
| SpatialInertia< T > CalcSpatialInertia | ( | const systems::Context< T > & | context, |
| const Frame< T > & | frame_F, | ||
| const std::vector< BodyIndex > & | body_indexes ) const |
Returns M_SFo_F, the spatial inertia of a set S of bodies about point Fo (the origin of a frame F), expressed in frame F.
You may regard M_SFo_F as measuring spatial inertia as if the set S of bodies were welded into a single composite body at the configuration specified in the context.
| [in] | context | Contains the configuration of the set S of bodies. |
| [in] | frame_F | specifies the about-point Fo (frame_F's origin) and the expressed-in frame for the returned spatial inertia. |
| [in] | body_indexes | Array of selected bodies. This method does not distinguish between welded bodies, joint-connected bodies, etc. |
| std::exception | if body_indexes contains an invalid BodyIndex or if there is a repeated BodyIndex. |
| SpatialMomentum< T > CalcSpatialMomentumInWorldAboutPoint | ( | const systems::Context< T > & | context, |
| const std::vector< ModelInstanceIndex > & | model_instances, | ||
| const Vector3< T > & | p_WoP_W ) const |
This method returns the spatial momentum of a set of model instances in the world frame W, about a designated point P, expressed in frame W.
| [in] | context | Contains the state of the model. |
| [in] | model_instances | Set of selected model instances. |
| [in] | p_WoP_W | Position from Wo (origin of the world frame W) to an arbitrary point P, expressed in the world frame W. |
| L_WSP_W,spatial | momentum of the system S represented by the model_instances, measured in world frame W, about point P, expressed in W. |
MultibodyPlant<T> plant; // ... code to create a set of selected model instances, e.g., ... const ModelInstanceIndex gripper_model_instance = plant.GetModelInstanceByName("gripper"); const ModelInstanceIndex robot_model_instance = plant.GetBodyByName("end_effector").model_instance(); const std::vector<ModelInstanceIndex> model_instances{ gripper_model_instance, robot_model_instance}; const Vector3<T> p_WoScm_W = plant.CalcCenterOfMassPositionInWorld(context, model_instances); SpatialMomentum<T> L_WScm_W = plant.CalcSpatialMomentumInWorldAboutPoint(context, model_instances, p_WoScm_W);
| std::exception | if model_instances contains an invalid ModelInstanceIndex. |
| SpatialMomentum< T > CalcSpatialMomentumInWorldAboutPoint | ( | const systems::Context< T > & | context, |
| const Vector3< T > & | p_WoP_W ) const |
This method returns the spatial momentum of this MultibodyPlant in the world frame W, about a designated point P, expressed in the world frame W.
| [in] | context | Contains the state of the model. |
| [in] | p_WoP_W | Position from Wo (origin of the world frame W) to an arbitrary point P, expressed in the world frame W. |
| L_WSP_W,spatial | momentum of the system S represented by this plant, measured in the world frame W, about point P, expressed in W. |
MultibodyPlant<T> plant; // ... code to load a model .... const Vector3<T> p_WoScm_W = plant.CalcCenterOfMassPositionInWorld(context); const SpatialMomentum<T> L_WScm_W = plant.CalcSpatialMomentumInWorldAboutPoint(context, p_WoScm_W);
| void CalcSystemJacobianTransposeTimesF | ( | const systems::Context< T > & | context, |
| std::vector< SpatialForce< T > > * | F_Bo_W_array, | ||
| EigenPtr< VectorX< T > > | tau ) const |
(Advanced) Computes τ = Jᵀ⋅F, the transpose-times-vector product of the System Jacobian Jᵀ times a per-mobilized body spatial force F, in O(n) time (that is, without forming J).
Here J is the System Jacobian — the block-row-stacked Jacobian Jv_V_WB_W whose Bᵢ-th block is ∂V_WBᵢ_W/∂v, the Jacobian of mobilized body Bᵢ's spatial velocity in World (at Bᵢ's origin Boᵢ, expressed in W) with respect to the generalized velocities v. See EvalBlockSystemJacobian() for the matrix-form companion.
Given applied spatial forces F_Bo_W_array[k] for each mobilized body k (about its body origin Bo, expressed in World), this method returns
τ = ∑ₖ Jv_V_WBₖᵀ ⋅ F_Boₖ_W (1)
the generalized forces generated by the applied spatial forces.
| [in] | context | The state of the multibody system. |
| [in,out] | F_Bo_W_array | Per-mobilized-body applied spatial forces, sized graph().forest().num_mobods(), ordered by MobodIndex (entry 0 corresponds to World; it is read but has no effect on τ). This array is destroyed during the computation: the operator sweeps tip-to-base, shifting each body's accumulated force into its parent's entry of F_Bo_W_array in place to avoid allocating a scratch copy. |
| [out] | tau | On exit, sized num_velocities(), the generalized force generated by the applied spatial forces. |
| std::exception | if F_Bo_W_array or tau is nullptr or the wrong size. |
| T CalcTotalMass | ( | const systems::Context< T > & | context | ) | const |
Calculates the total mass of all bodies in this MultibodyPlant.
| [in] | context | Contains the state of the model. |
| The | total mass of all bodies or 0 if there are none. |
| T CalcTotalMass | ( | const systems::Context< T > & | context, |
| const std::vector< ModelInstanceIndex > & | model_instances ) const |
Calculates the total mass of all bodies contained in model_instances.
| [in] | context | Contains the state of the model. |
| [in] | model_instances | Vector of selected model instances. This method does not distinguish between welded, joint connected, or floating bodies. |
| The | total mass of all bodies belonging to a model instance in model_instances or 0 if model_instances is empty. |
| geometry::GeometrySet CollectRegisteredGeometries | ( | const std::vector< const RigidBody< T > * > & | bodies | ) | const |
For each of the provided bodies, collects up all geometries that have been registered to that body.
Intended to be used in conjunction with CollisionFilterDeclaration and CollisionFilterManager::Apply() to filter collisions between the geometries registered to the bodies.
For example:
Changing the order will cause exceptions to be thrown.
| std::exception | if this MultibodyPlant was not registered with a SceneGraph. |
| const DeformableModel< T > & deformable_model | ( | ) | const |
Returns the DeformableModel owned by this plant.
| const std::vector< Eigen::MatrixX< T > > & EvalBlockSystemJacobian | ( | const systems::Context< T > & | context | ) | const |
(Internal use only) Returns the System Jacobian Jv_V_WB(q) in block form.
Each block is dense and corresponds to one Tree of the as-built internal::SpanningForest. The blocks follow the Tree ordering defined by the SpanningForest, so are in TreeIndex order. The block for Treeᵢ is a MatrixX of size 6nᵢ x mᵢ, where nᵢ is the number of mobilized bodies in Treeᵢ and mᵢ is the total number of mobilizer velocity degrees of freedom (mobilities) in the Tree. Every Tree has an entry even if it has no mobilities (in that case mᵢ=0). World is not part of any Tree so there is no block corresponding to World here.
To be precise: the iᵗʰ block Jvi_V_WB ≡ ∂Vi_WB/∂vᵢ where Vi_WB is the stacked spatial velocities for each mobilized body in Treeᵢ (in order of MobodIndex), and vᵢ is the vector of generalized velocities associated with those mobilized bodies, in the same order. Thus Jvi_V_WB⋅v for some set of mᵢ generalized velocities v, returns the spatial velocities for each body in Treeᵢ that would result from velocities v.
Note that locking and unlocking mobilizers does not affect the Jacobian; the Jacobian reflects what would happen if a velocity variable changed regardless of whether it can currently do so.
| const math::RigidTransform< T > & EvalBodyPoseInWorld | ( | const systems::Context< T > & | context, |
| const RigidBody< T > & | body_B ) const |
Evaluate the pose X_WB of a body B in the world frame W.
| [in] | context | The context storing the state of the model. |
| [in] | body_B | The body B for which the pose is requested. |
| X_WB | The pose of body frame B in the world frame W. |
| std::exception | if Finalize() was not called on this model or if body_B does not belong to this model. |
| const SpatialAcceleration< T > & EvalBodySpatialAccelerationInWorld | ( | const systems::Context< T > & | context, |
| const RigidBody< T > & | body_B ) const |
Evaluates A_WB, body B's spatial acceleration in the world frame W.
| [in] | context | The context storing the state of the model. |
| [in] | body_B | The body for which spatial acceleration is requested. |
| A_WB_W | RigidBody B's spatial acceleration in the world frame W, expressed in W (for point Bo, the body's origin). |
| std::exception | if Finalize() was not called on this model or if body_B does not belong to this model. |
| const SpatialVelocity< T > & EvalBodySpatialVelocityInWorld | ( | const systems::Context< T > & | context, |
| const RigidBody< T > & | body_B ) const |
Evaluates V_WB, body B's spatial velocity in the world frame W.
| [in] | context | The context storing the state of the model. |
| [in] | body_B | The body B for which the spatial velocity is requested. |
| V_WB_W | RigidBody B's spatial velocity in the world frame W, expressed in W (for point Bo, the body's origin). |
| std::exception | if Finalize() was not called on this model or if body_B does not belong to this model. |
| const geometry::SceneGraphInspector< T > & EvalSceneGraphInspector | ( | const systems::Context< T > & | context | ) | const |
Returns the inspector from the context for the SceneGraph associated with this plant, via this plant's "geometry_query" input port.
(In the future, the inspector might come from a different context source that is more efficient than the "geometry_query" input port.)
| void ExcludeCollisionGeometriesWithCollisionFilterGroupPair | ( | const std::pair< std::string, geometry::GeometrySet > & | collision_filter_group_a, |
| const std::pair< std::string, geometry::GeometrySet > & | collision_filter_group_b ) |
Excludes the collision geometries between two given collision filter groups.
| void Finalize | ( | ) |
This method must be called after all elements in the model (joints, bodies, force elements, constraints, etc.) are added and before any computations are performed.
It essentially compiles all the necessary "topological information", i.e. how bodies, joints and, any other elements connect with each other, and performs all the required pre-processing to enable computations at a later stage.
If the finalize stage is successful, the topology of this MultibodyPlant is valid, meaning that the topology is up-to-date after this call. No more multibody elements can be added after a call to Finalize().
At Finalize(), state and input/output ports for this plant are declared.
For a full account of the effects of Finalize(), see Finalize() stage.
| std::exception | if the MultibodyPlant has already been finalized. |
| bool geometry_source_is_registered | ( | ) | const |
Returns true if this MultibodyPlant was registered with a SceneGraph.
This method can be called at any time during the lifetime of this plant to query if this plant has been registered with a SceneGraph, either pre- or post-finalize, see Finalize().
| const systems::InputPort< T > & get_actuation_input_port | ( | ) | const |
Returns a constant reference to the input port for external actuation for all actuated dofs.
This input port is a vector valued port and can be set with JointActuator::set_actuation_vector(). The actuation value for a particular actuator can be found at offset JointActuator::input_start() in this vector. Refer to Actuation for further details.
| std::exception | if called before Finalize(). |
| const systems::InputPort< T > & get_actuation_input_port | ( | ModelInstanceIndex | model_instance | ) | const |
Returns a constant reference to the input port for external actuation for a specific model instance.
This is a vector valued port with entries ordered by monotonically increasing JointActuatorIndex within model_instance. Refer to Actuation for further details.
Every model instance in this plant model has an actuation input port, even if zero sized (for model instance with no actuators).
| std::exception | if called before Finalize(). |
| std::exception | if the model instance does not exist. |
| bool get_adjacent_bodies_collision_filters | ( | ) | const |
Returns whether to apply collision filters to topologically adjacent bodies at Finalize() time.
| const systems::InputPort< T > & get_applied_generalized_force_input_port | ( | ) | const |
Returns a constant reference to the vector-valued input port for applied generalized forces, and the vector will be added directly into tau (see System dynamics).
This vector is ordered using the same convention as the plant velocities: you can set the generalized forces that will be applied to model instance i using, e.g., SetVelocitiesInArray(i, model_forces, &force_array).
| std::exception | if called before Finalize(). |
| const systems::InputPort< T > & get_applied_spatial_force_input_port | ( | ) | const |
Returns a constant reference to the input port for applying spatial forces to bodies in the plant.
The data type for the port is an std::vector of ExternallyAppliedSpatialForce; any number of spatial forces can be applied to any number of bodies in the plant.
| const std::map< MultibodyConstraintId, internal::BallConstraintSpec > & get_ball_constraint_specs | ( | ) | const |
(Internal use only) Returns a reference to all of the ball constraints in this plant as a map from MultibodyConstraintId to BallConstraintSpec.
| const internal::BallConstraintSpec & get_ball_constraint_specs | ( | MultibodyConstraintId | id | ) | const |
(Internal use only) Returns the ball constraint specification corresponding to id
| if | id is not a valid identifier for a ball constraint. |
Returns a constant reference to the body with unique index body_index.
| std::exception | if body_index does not correspond to a body in this model. |
| const systems::OutputPort< T > & get_body_poses_output_port | ( | ) | const |
Reports all body poses in the world frame as an abstract-valued output port containing an std::vector<math::RigidTransform<T>> of size num_bodies().
You can obtain the pose X_WB of a body B in the world frame W with:
As shown in the example above, the resulting std::vector of body poses is indexed by BodyIndex, and it has size num_bodies(). BodyIndex "zero" (0) always corresponds to the world body, with pose equal to the identity at all times.
| std::exception | if called pre-finalize. |
| const systems::OutputPort< T > & get_body_spatial_accelerations_output_port | ( | ) | const |
Reports all body spatial accelerations in the world frame as an abstract-valued output port containing an std::vector<SpatialAcceleration<T>> of size num_bodies().
You can obtain the spatial acceleration A_WB of a body B (for point Bo, the body's origin) in the world frame W with:
As shown in the example above, the resulting std::vector of body spatial accelerations is indexed by BodyIndex, and it has size num_bodies(). BodyIndex "zero" (0) always corresponds to the world body, with zero spatial acceleration at all times.
In a discrete-time plant, the use_sampled_output_ports setting affects the output of this port. See Output port sampling for details. When sampling is enabled and the plant has not yet taken a step, the output value will be all zeros.
| std::exception | if called pre-finalize. |
| const systems::OutputPort< T > & get_body_spatial_velocities_output_port | ( | ) | const |
Reports all body spatial velocities in the world frame as an abstract-valued output port containing an std::vector<SpatialVelocity<T>> of size num_bodies().
You can obtain the spatial velocity V_WB of a body B in the world frame W with:
As shown in the example above, the resulting std::vector of body spatial velocities is indexed by BodyIndex, and it has size num_bodies(). BodyIndex "zero" (0) always corresponds to the world body, with zero spatial velocity at all times.
| std::exception | if called pre-finalize. |
| ContactModel get_contact_model | ( | ) | const |
Returns the model used for contact. See documentation for ContactModel.
| double get_contact_penalty_method_time_scale | ( | ) | const |
Returns a time-scale estimate tc based on the requested penetration allowance δ set with set_penetration_allowance().
For the compliant contact model to enforce non-penetration, this time scale relates to the time it takes the relative normal velocity between two bodies to go to zero. This time scale tc is a global estimate of the dynamics introduced by the compliant contact model and goes to zero in the limit to ideal rigid contact. Since numerical integration methods for continuum systems must be able to resolve a system's dynamics, the time step used by an integrator must in general be much smaller than the time scale tc. How much smaller will depend on the details of the problem and the convergence characteristics of the integrator and should be tuned appropriately. Another factor to take into account for setting up the simulation's time step is the speed of the objects in your simulation. If vn represents a reference velocity scale for the normal relative velocity between bodies, the new time scale tn = δ / vn represents the time it would take for the distance between two bodies approaching with relative normal velocity vn to decrease by the penetration_allowance δ. In this case a user should choose a time step for simulation that can resolve the smallest of the two time scales tc and tn.
| const systems::OutputPort< T > & get_contact_results_output_port | ( | ) | const |
Returns an abstract-valued output port containing a ContactResults.
In a discrete-time plant, the use_sampled_output_ports setting affects the output of this port. See Output port sampling for details. When sampling is enabled and the plant has not yet taken a step, the output value will be empty (no contacts).
| std::exception | if called pre-finalize, see Finalize(). |
| geometry::HydroelasticContactRepresentation get_contact_surface_representation | ( | ) | const |
Gets the current representation of contact surfaces used by this MultibodyPlant.
| const std::map< MultibodyConstraintId, internal::CouplerConstraintSpec > & get_coupler_constraint_specs | ( | ) | const |
(Internal use only) Returns a reference to the all of the coupler constraints in this plant as a map from MultibodyConstraintId to CouplerConstraintSpec.
| const internal::CouplerConstraintSpec & get_coupler_constraint_specs | ( | MultibodyConstraintId | id | ) | const |
(Internal use only) Returns the coupler constraint specification corresponding to id
| if | id is not a valid identifier for a coupler constraint. |
| const systems::OutputPort< T > & get_deformable_body_configuration_output_port | ( | ) | const |
Reports vertex positions (configurations), measured and expressed in the world frame, of the deformable bodies in this plant as an abstract-valued output port containing a GeometryConfigurationVector<T>.
| const systems::InputPort< T > & get_desired_state_input_port | ( | ModelInstanceIndex | model_instance | ) | const |
For models with PD controlled joint actuators, returns the port to provide the desired state for the given model_instance.
Refer to Actuation for further details.
For consistency with get_actuation_input_port(), each model instance in this plant model has a desired states input port, even if zero sized (for model instance with no actuators.)
As an example of this structure, consider the following code to fix desired states input values:
| DiscreteContactApproximation get_discrete_contact_approximation | ( | ) | const |
| DiscreteContactSolver get_discrete_contact_solver | ( | ) | const |
Returns the contact solver type used for discrete MultibodyPlant models.
| const ForceElement< T > & get_force_element | ( | ForceElementIndex | force_element_index | ) | const |
Returns a constant reference to the force element with unique index force_element_index.
| std::exception | when force_element_index does not correspond to a force element in this model. |
| const Frame< T > & get_frame | ( | FrameIndex | frame_index | ) | const |
Returns a constant reference to the frame with unique index frame_index.
| std::exception | if frame_index does not correspond to a frame in this plant. |
| const systems::OutputPort< T > & get_generalized_acceleration_output_port | ( | ) | const |
Reports the generalized accelerations v̇ of the model as a vector-valued output port of size num_velocities().
In a discrete-time plant, the use_sampled_output_ports setting affects the output of this port. See Output port sampling for details. When sampling is enabled and the plant has not yet taken a step, the output value will be all zeros.
| std::exception | if called before Finalize(). |
| const systems::OutputPort< T > & get_generalized_acceleration_output_port | ( | ModelInstanceIndex | model_instance | ) | const |
Reports the generalized accelerations v̇ᵢ for the given model_instance i as a vector-valued output port of size num_velocities(model_instance).
In a discrete-time plant, the use_sampled_output_ports setting affects the output of this port. See Output port sampling for details. When sampling is enabled and the plant has not yet taken a step, the output value will be all zeros.
| std::exception | if called before Finalize(). |
| std::exception | if the model instance does not exist. |
| const systems::OutputPort< T > & get_generalized_contact_forces_output_port | ( | ModelInstanceIndex | model_instance | ) | const |
Reports the generalized contact forces for the given model_instance as a vector-valued output port of size num_actuated_dofs(model_instance).
In a discrete-time plant, the use_sampled_output_ports setting affects the output of this port. See Output port sampling for details. When sampling is enabled and the plant has not yet taken a step, the output value will be all zeros.
| std::exception | if called before Finalize(). |
| std::exception | if the model instance does not exist. |
| const systems::OutputPort< T > & get_geometry_pose_output_port | ( | ) | const |
Reports frames' poses of all non-world bodies in this plant as an abstract-valued output port containing a FramePoseVector<T>.
Poses are measured and expressed in the World frame. This port is intended to be connected to a SceneGraph<T> pose input port to communicate frame poses.
| const systems::InputPort< T > & get_geometry_query_input_port | ( | ) | const |
Returns a constant reference to the input port used to perform geometric queries on a SceneGraph.
See SceneGraph::get_query_output_port(). Refer to section Geometry of this class's documentation for further details on collision geometry registration and connection with a SceneGraph.
| const Joint< T > & get_joint | ( | JointIndex | joint_index | ) | const |
Returns a constant reference to the joint with unique index joint_index.
| std::exception | when joint_index does not correspond to a joint in this model. |
| const JointActuator< T > & get_joint_actuator | ( | JointActuatorIndex | actuator_index | ) | const |
Returns a constant reference to the joint actuator with unique index actuator_index.
| std::exception | if actuator_index does not correspond to a joint actuator in this tree. |
| Joint< T > & get_mutable_joint | ( | JointIndex | joint_index | ) |
Returns a mutable reference to the joint with unique index joint_index.
| std::exception | when joint_index does not correspond to a joint in this model. |
| JointActuator< T > & get_mutable_joint_actuator | ( | JointActuatorIndex | actuator_index | ) |
Returns a mutable reference to the joint actuator with unique index actuator_index.
| std::exception | if actuator_index does not correspond to a joint actuator in this tree. |
| const systems::OutputPort< T > & get_net_actuation_output_port | ( | ) | const |
Reports the actuation values applied by joint actuators as a vector-valued output port of size num_actuated_dofs().
The actuation value for a particular actuator can be found at offset JointActuator::input_start() in this vector. Models that include PD controllers will include their contribution in this port, refer to Actuation for further details.
In a discrete-time plant, the use_sampled_output_ports setting affects the output of this port. See Output port sampling for details. When sampling is enabled and the plant has not yet taken a step, the output value will be all zeros.
| std::exception | if called before Finalize(). |
| const systems::OutputPort< T > & get_net_actuation_output_port | ( | ModelInstanceIndex | model_instance | ) | const |
Reports the actuation values applied by joint actuators for the given model_instance as a vector-valued output port of size num_actuated_dofs(model_instance).
Models that include PD controllers will include their contribution in this port, refer to Actuation for further details. This is a vector valued port with entries ordered by monotonically increasing JointActuatorIndex within model_instance.
Every model instance in this plant model has a net actuation output port, even if zero sized (for model instance with no actuators).
In a discrete-time plant, the use_sampled_output_ports setting affects the output of this port. See Output port sampling for details. When sampling is enabled and the plant has not yet taken a step, the output value will be all zeros.
| std::exception | if called before Finalize(). |
| const systems::OutputPort< T > & get_reaction_forces_output_port | ( | ) | const |
Reports joint reaction forces as an abstract-valued output port containing an std::vector<SpatialForce<T>> of size num_joints().
A Joint models the kinematical relationship which characterizes the possible relative motion between two bodies. In Drake, a joint connects a frame Jp on parent body P with a frame Jc on a child body C. This usage of the terms parent and child is just a convention and implies nothing about the inboard-outboard relationship between the bodies. Since a Joint imposes a kinematical relationship which characterizes the possible relative motion between frames Jp and Jc, reaction forces on each body are established. That is, we could cut the model at the joint and replace it with equivalent forces equal to these reaction forces in order to attain the same motions of the mechanical system.
This output port allows to evaluate the reaction force F_CJc_Jc on the child body C, at Jc, and expressed in Jc for all joints in the model. This port evaluates to a vector of type std::vector<SpatialForce<T>> and size num_joints() indexed by JointIndex, see Joint::index(). Each entry corresponds to the spatial force F_CJc_Jc applied on the joint's child body C (Joint::child_body()), at the joint's child frame Jc (Joint::frame_on_child()) and expressed in frame Jc.
In a discrete-time plant, the use_sampled_output_ports setting affects the output of this port. See Output port sampling for details. When sampling is enabled and the plant has not yet taken a step, the output value will be all zeros.
| std::exception | if called pre-finalize. |
| double get_sap_near_rigid_threshold | ( | ) | const |
| std::optional< geometry::SourceId > get_source_id | ( | ) | const |
Returns the unique id identifying this plant as a source for a SceneGraph.
Returns nullopt if this plant did not register any geometry. This method can be called at any time during the lifetime of this plant to query if this plant has been registered with a SceneGraph, either pre- or post-finalize, see Finalize(). However, a geometry::SourceId is only assigned once at the first call of any of this plant's geometry registration methods, and it does not change after that. Post-finalize calls will always return the same value.
| const systems::OutputPort< T > & get_state_output_port | ( | ) | const |
Reports the multibody state x = [q, v] of the model as a vector-valued output port of size num_multibody_states().
| std::exception | if called before Finalize(). |
| const systems::OutputPort< T > & get_state_output_port | ( | ModelInstanceIndex | model_instance | ) | const |
Reports the multibody state xᵢ = [qᵢ vᵢ] for the given model_instance i as a vector-valued output port of size num_multibody_states(model_instance).
Here qᵢ ⊆ q and vᵢ ⊆ v.
| std::exception | if called before Finalize(). |
| std::exception | if the model instance does not exist. |
| const std::map< MultibodyConstraintId, internal::TendonConstraintSpec > & get_tendon_constraint_specs | ( | ) | const |
(Internal use only) Returns a reference to the all of the tendon constraints in this plant as a map from MultibodyConstraintId to TendonConstraintSpec.
| const internal::TendonConstraintSpec & get_tendon_constraint_specs | ( | MultibodyConstraintId | id | ) | const |
(Internal use only) Returns the tendon constraint specification corresponding to id
| if | id is not a valid identifier for a tendon constraint. |
| const std::map< MultibodyConstraintId, internal::WeldConstraintSpec > & get_weld_constraint_specs | ( | ) | const |
(Internal use only) Returns a reference to the all of the weld constraints in this plant as a map from MultibodyConstraintId to WeldConstraintSpec.
| const internal::WeldConstraintSpec & get_weld_constraint_specs | ( | MultibodyConstraintId | id | ) | const |
(Internal use only) Returns the weld constraint specification corresponding to id
| if | id is not a valid identifier for a weld constraint. |
| VectorX< double > GetAccelerationLowerLimits | ( | ) | const |
Returns a vector of size num_velocities() containing the lower acceleration limits for every generalized velocity coordinate.
These include joint and free body coordinates. Any unbounded or unspecified limits will be -infinity.
| std::exception | if called pre-finalize. |
| VectorX< double > GetAccelerationUpperLimits | ( | ) | const |
Upper limit analog of GetAccelerationsLowerLimits(), where any unbounded or unspecified limits will be +infinity.
| std::vector< JointIndex > GetActuatedJointIndices | ( | ModelInstanceIndex | model_instance | ) | const |
Returns a list of actuated joint indices associated with model_instance.
| std::exception | if called pre-finalize. |
| VectorX< T > GetActuationFromArray | ( | ModelInstanceIndex | model_instance, |
| const Eigen::Ref< const VectorX< T > > & | u ) const |
Returns a vector of actuation values for model_instance from a vector u of actuation values for the entire plant model.
Refer to Actuation for further details.
| [in] | u | Actuation values for the entire model. The actuation value in u for a particular actuator must be found at offset JointActuator::input_start(). |
| std::exception | if u is not of size MultibodyPlant::num_actuated_dofs(). |
| std::vector< std::string > GetActuatorNames | ( | bool | add_model_instance_prefix = true | ) | const |
Returns a list of string names corresponding to each element of the actuation vector.
These strings take the form {model_instance_name}_{joint_actuator_name}, but the prefix may optionally be withheld using add_model_instance_prefix.
The returned names are guaranteed to be unique if add_model_instance_prefix is true (the default).
| std::exception | if the plant is not finalized. |
| std::vector< std::string > GetActuatorNames | ( | ModelInstanceIndex | model_instance, |
| bool | add_model_instance_prefix = false ) const |
Returns a list of string names corresponding to each element of the actuation vector.
These strings take the form {model_instance_name}_{joint_actuator_name}, but the prefix may optionally be withheld using add_model_instance_prefix.
The returned names are guaranteed to be unique.
| std::exception | if the plant is not finalized or if the model_instance is invalid. |
| BaseBodyJointType GetBaseBodyJointType | ( | std::optional< ModelInstanceIndex > | model_instance = {} | ) | const |
Returns the currently-set choice for base body joint type, either for the global setting or for a specific model instance if provided.
If a model instance is provided for which no explicit choice has been made, the global setting is returned. Any model instance index is acceptable here; if not recognized then the global setting is returned. This can be called any time – pre-finalize it returns the joint type that will be used by Finalize(); post-finalize it returns the joint type that was used if there were any base bodies in need of a joint.
| std::vector< BodyIndex > GetBodiesKinematicallyAffectedBy | ( | const std::vector< JointIndex > & | joint_indexes | ) | const |
Returns all bodies whose kinematics are transitively affected by the given vector of Joints.
This is a kinematic relationship rather than a dynamic one. It is is inherently a query on the topology of the plant's modeled tree. Constraints are likewise not considered.
The affected bodies are returned in increasing order of body indices. A body is included in the output if that body's spatial velocity is affected by the generalized velocities v of one of the indicated joints.
As such, there are some notable implications:
This function can be only be called post-finalize, see Finalize().
| std::exception | if any of the given joint has an invalid index, doesn't correspond to a mobilizer, or is welded. |
| std::vector< const RigidBody< T > * > GetBodiesWeldedTo | ( | const RigidBody< T > & | body | ) | const |
Returns all bodies that are transitively welded, or rigidly affixed, to body, per these two definitions:
This method can be called at any time during the lifetime of this plant, either pre- or post-finalize, see Finalize().
Meant to be used with CollectRegisteredGeometries.
The following example demonstrates filtering collisions between all bodies rigidly affixed to a door (which could be moving) and all bodies rigidly affixed to the world:
| std::exception | if body is not part of this plant. |
| const RigidBody< T > & GetBodyByName | ( | std::string_view | name | ) | const |
Returns a constant reference to a body that is identified by the string name in this MultibodyPlant.
| std::exception | if there is no body with the requested name. |
| std::exception | if the body name occurs in multiple model instances. |
| const RigidBody< T > & GetBodyByName | ( | std::string_view | name, |
| ModelInstanceIndex | model_instance ) const |
Returns a constant reference to the body that is uniquely identified by the string name and model_instance in this MultibodyPlant.
| std::exception | if there is no body with the requested name. |
| std::optional< geometry::FrameId > GetBodyFrameIdIfExists | ( | BodyIndex | body_index | ) | const |
If the body with body_index belongs to the called plant, it returns the geometry::FrameId associated with it.
Otherwise, it returns nullopt.
| geometry::FrameId GetBodyFrameIdOrThrow | ( | BodyIndex | body_index | ) | const |
If the body with body_index belongs to the called plant, it returns the geometry::FrameId associated with it.
Otherwise this method throws an exception.
| std::exception | if the called plant does not have the body indicated by body_index. |
| const RigidBody< T > * GetBodyFromFrameId | ( | geometry::FrameId | frame_id | ) | const |
Given a geometry frame identifier, returns a pointer to the body associated with that id (nullptr if there is no such body).
| std::vector< BodyIndex > GetBodyIndices | ( | ModelInstanceIndex | model_instance | ) | const |
Returns a list of body indices associated with model_instance.
| const std::vector< geometry::GeometryId > & GetCollisionGeometriesForBody | ( | const RigidBody< T > & | body | ) | const |
Returns an array of GeometryId's identifying the different contact geometries for body previously registered with a SceneGraph.
| bool GetConstraintActiveStatus | ( | const systems::Context< T > & | context, |
| MultibodyConstraintId | id ) const |
Returns the active status of the constraint given by id in context.
| std::exception | if the MultibodyPlant has not been finalized. |
| std::exception | if id does not belong to any multibody constraint in context. |
| std::vector< MultibodyConstraintId > GetConstraintIds | ( | ) | const |
Returns a list of all constraint identifiers.
The returned vector becomes invalid after any calls to Add*Constraint() or RemoveConstraint().
|
static |
Return the default value for contact representation, given the desired time step.
Discrete systems default to use polygons; continuous systems default to use triangles.
| const std::map< MultibodyConstraintId, DistanceConstraintParams > & GetDefaultDistanceConstraintParams | ( | ) | const |
Returns all default distance constraint parameters, as registered via AddDistanceConstraint().
See GetDistanceConstraintParams() and SetDistanceConstraintParams() for working with parameters stored in a context.
| math::RigidTransform< double > GetDefaultFloatingBaseBodyPose | ( | const RigidBody< T > & | body | ) | const |
Gets the provisional default pose of body as set by SetDefaultFloatingBaseBodyPose().
If no pose was specified for body, returns the identity pose. This may be called pre- or post-Finalize().
See above for details.
| [in] | body | RigidBody whose default pose will be retrieved. |
| X_WB | The default pose of the floating base body B in World. Not meaningful if body is not a floating base body. |
| VectorX< T > GetDefaultPositions | ( | ) | const |
Gets the default positions for the plant, which can be changed via SetDefaultPositions().
| std::exception | if the plant is not finalized. |
| VectorX< T > GetDefaultPositions | ( | ModelInstanceIndex | model_instance | ) | const |
Gets the default positions for the plant for a given model instance, which can be changed via SetDefaultPositions().
| std::exception | if the plant is not finalized, or if the model_instance is invalid, |
| const std::map< MultibodyConstraintId, DistanceConstraintParams > & GetDistanceConstraintParams | ( | const systems::Context< T > & | context | ) | const |
Returns all distance constraint parameters currently stored in context.
| const DistanceConstraintParams & GetDistanceConstraintParams | ( | const systems::Context< T > & | context, |
| MultibodyConstraintId | id ) const |
Returns a constant reference to the parameters for the distance constraint that corresponds to identifier id.
| if | id is not a valid identifier for a distance constraint. |
| VectorX< double > GetEffortLowerLimits | ( | ) | const |
Returns a vector of size num_actuated_dofs() containing the lower effort limits for every actuator.
Any unbounded or unspecified limits will be -∞. The returned vector is indexed by JointActuatorIndex, see JointActuator::index().
| std::exception | if called pre-finalize. |
| VectorX< double > GetEffortUpperLimits | ( | ) | const |
Returns a vector of size num_actuated_dofs() containing the upper effort limits for every actuator.
Any unbounded or unspecified limits will be +∞. The returned vector is indexed by JointActuatorIndex, see JointActuator::index().
| std::exception | if called pre-finalize. |
| std::unordered_set< BodyIndex > GetFloatingBaseBodies | ( | ) | const |
Returns the set of body indices corresponding to the floating base bodies in the model, in no particular order.
See above for details.
| std::exception | if called pre-finalize, see Finalize(). |
| const ForceElementType< T > & GetForceElement | ( | ForceElementIndex | force_element_index | ) | const |
Returns a constant reference to a force element identified by its unique index in this MultibodyPlant.
If the optional template argument is supplied, then the returned value is downcast to the specified ForceElementType.
| ForceElementType | The specific type of the ForceElement to be retrieved. It must be a subclass of ForceElement. |
| std::exception | if the force element is not of type ForceElementType or if there is no ForceElement with that index. |
| const Frame< T > & GetFrameByName | ( | std::string_view | name | ) | const |
Returns a constant reference to a frame that is identified by the string name in this model.
| std::exception | if there is no frame with the requested name. |
| std::exception | if the frame name occurs in multiple model instances. |
| const Frame< T > & GetFrameByName | ( | std::string_view | name, |
| ModelInstanceIndex | model_instance ) const |
Returns a constant reference to the frame that is uniquely identified by the string name in model_instance.
| std::exception | if there is no frame with the requested name. |
| std::exception | if model_instance is not valid for this model. |
| std::vector< FrameIndex > GetFrameIndices | ( | ModelInstanceIndex | model_instance | ) | const |
Returns a list of frame indices associated with model_instance.
| math::RigidTransform< T > GetFreeBodyPose | ( | const systems::Context< T > & | context, |
| const RigidBody< T > & | body ) const |
For any free body's 6-dof joint, gets the pose X_JpJc of the child frame Jc in its parent frame Jp.
See above for details.
| X_JpJc | The current pose of child frame Jc in its parent frame Jp. Returns X_WB if body B is a floating base body. |
| std::exception | if called pre-finalize. |
| std::exception | if body is not a free body. |
| bool GetFuseWeldedLinks | ( | std::optional< ModelInstanceIndex > | model_instance = {} | ) | const |
(Internal use only for now) Returns the global or a model_instance setting for whether or not to fuse welded Link (RigidBody) elements.
| [in] | model_instance | (optional). If this argument is missing or not recognized, returns the global setting. Otherwise returns the setting for this specific model_instance. |
| const JointActuator< T > & GetJointActuatorByName | ( | std::string_view | name | ) | const |
Returns a constant reference to an actuator that is identified by the string name in this MultibodyPlant.
| std::exception | if there is no actuator with the requested name. |
| std::exception | if the actuator name occurs in multiple model instances. |
| const JointActuator< T > & GetJointActuatorByName | ( | std::string_view | name, |
| ModelInstanceIndex | model_instance ) const |
Returns a constant reference to the actuator that is uniquely identified by the string name and model_instance in this MultibodyPlant.
| std::exception | if there is no actuator with the requested name. |
| std::exception | if model_instance is not valid for this model. |
| const std::vector< JointActuatorIndex > & GetJointActuatorIndices | ( | ) | const |
Returns a list of all joint actuator indices.
The vector is ordered by monotonically increasing JointActuatorIndex, but the indices will in general not be consecutive due to actuators that were removed.
| std::vector< JointActuatorIndex > GetJointActuatorIndices | ( | ModelInstanceIndex | model_instance | ) | const |
Returns a list of joint actuator indices associated with model_instance.
The vector is ordered by monotonically increasing JointActuatorIndex.
| std::exception | if called pre-finalize. |
| const JointType< T > & GetJointByName | ( | std::string_view | name, |
| std::optional< ModelInstanceIndex > | model_instance = std::nullopt ) const |
Returns a constant reference to a joint that is identified by the string name in this MultibodyPlant.
If the optional template argument is supplied, then the returned value is downcast to the specified JointType.
| JointType | The specific type of the Joint to be retrieved. It must be a subclass of Joint. |
| std::exception | if the named joint is not of type JointType or if there is no Joint with that name. |
| std::exception | if model_instance is not valid for this model. |
| const std::vector< JointIndex > & GetJointIndices | ( | ) | const |
Returns a list of all joint indices.
The vector is ordered by monotonically increasing JointIndex, but the indices will in general not be consecutive due to joints that were removed.
| std::vector< JointIndex > GetJointIndices | ( | ModelInstanceIndex | model_instance | ) | const |
Returns a list of joint indices associated with model_instance.
| ModelInstanceIndex GetModelInstanceByName | ( | std::string_view | name | ) | const |
Returns the index to the model instance that is uniquely identified by the string name in this MultibodyPlant.
| std::exception | if there is no instance with the requested name. |
| const std::string & GetModelInstanceName | ( | ModelInstanceIndex | model_instance | ) | const |
Returns the name of a model_instance.
| std::exception | when model_instance does not correspond to a model in this model. |
| JointType< T > & GetMutableJointByName | ( | std::string_view | name, |
| std::optional< ModelInstanceIndex > | model_instance = std::nullopt ) |
A version of GetJointByName that returns a mutable reference.
| geometry::SceneGraph< T > * GetMutableSceneGraphPreFinalize | ( | ) |
(Internal use only) Returns a mutable pointer to the SceneGraph that this plant is registered as a source for.
This method can only be used pre-Finalize.
| std::exception | if is_finalized() == true || geometry_source_is_registered() == false |
| VectorX< double > GetPositionLowerLimits | ( | ) | const |
Returns a vector of size num_positions() containing the lower position limits for every generalized position coordinate.
These include joint and free body coordinates. Any unbounded or unspecified limits will be -infinity.
| std::exception | if called pre-finalize. |
| std::vector< std::string > GetPositionNames | ( | bool | add_model_instance_prefix = true, |
| bool | always_add_suffix = true ) const |
Returns a list of string names corresponding to each element of the position vector.
These strings take the form {model_instance_name}_{joint_name}_{joint_position_suffix}, but the prefix and suffix may optionally be withheld using add_model_instance_prefix and always_add_suffix.
| always_add_suffix | (optional). If true, then the suffix is always added. If false, then the suffix is only added for joints that have more than one position (in this case, not adding would lead to ambiguity). |
The returned names are guaranteed to be unique if add_model_instance_prefix is true (the default).
| std::exception | if the plant is not finalized. |
| std::vector< std::string > GetPositionNames | ( | ModelInstanceIndex | model_instance, |
| bool | add_model_instance_prefix = false, | ||
| bool | always_add_suffix = true ) const |
Returns a list of string names corresponding to each element of the position vector.
These strings take the form {model_instance_name}_{joint_name}_{joint_position_suffix}, but the prefix and suffix may optionally be withheld using add_model_instance_prefix and always_add_suffix.
| always_add_suffix | (optional). If true, then the suffix is always added. If false, then the suffix is only added for joints that have more than one position (in this case, not adding would lead to ambiguity). |
The returned names are guaranteed to be unique.
| std::exception | if the plant is not finalized or if the model_instance is invalid. |
| Eigen::VectorBlock< const VectorX< T > > GetPositions | ( | const systems::Context< T > & | context | ) | const |
Returns a const vector reference to the vector of generalized positions q in a given Context.
| std::exception | if context does not correspond to the Context for a multibody model. |
| VectorX< T > GetPositions | ( | const systems::Context< T > & | context, |
| ModelInstanceIndex | model_instance ) const |
Returns a vector containing the generalized positions q of a specified model instance in a given Context.
| std::exception | if context does not correspond to the Context for a multibody model or model_instance is invalid. |
| void GetPositions | ( | const systems::Context< T > & | context, |
| ModelInstanceIndex | model_instance, | ||
| EigenPtr< VectorX< T > > | q_out ) const |
(Advanced) Populates output vector q_out with the generalized positions q of a specified model instance in a given Context.
| std::exception | if context does not correspond to the Context for a multibody model or model_instance is invalid. |
| Eigen::VectorBlock< const VectorX< T > > GetPositionsAndVelocities | ( | const systems::Context< T > & | context | ) | const |
Returns a const vector reference [q; v] to the generalized positions q and generalized velocities v in a given Context.
| std::exception | if context does not correspond to the Context for a multibody model. |
| VectorX< T > GetPositionsAndVelocities | ( | const systems::Context< T > & | context, |
| ModelInstanceIndex | model_instance ) const |
Returns a vector [q; v] containing the generalized positions q and generalized velocities v of a specified model instance in a given Context.
| std::exception | if context does not correspond to the Context for a multibody model or model_instance is invalid. |
| void GetPositionsAndVelocities | ( | const systems::Context< T > & | context, |
| ModelInstanceIndex | model_instance, | ||
| EigenPtr< VectorX< T > > | qv_out ) const |
(Advanced) Populates output vector qv_out representing the generalized positions q and generalized velocities v of a specified model instance in a given Context.
| std::exception | if context does not correspond to the Context for a multibody model or model_instance is invalid. |
| std::exception | if qv_out does not have size num_positions(model_instance) + num_velocities(model_instance) |
| VectorX< T > GetPositionsFromArray | ( | ModelInstanceIndex | model_instance, |
| const Eigen::Ref< const VectorX< T > > & | q ) const |
Returns a vector of generalized positions for model_instance from a vector q_array of generalized positions for the entire model model.
This method throws an exception if q is not of size MultibodyPlant::num_positions().
| void GetPositionsFromArray | ( | ModelInstanceIndex | model_instance, |
| const Eigen::Ref< const VectorX< T > > & | q, | ||
| EigenPtr< VectorX< T > > | q_out ) const |
(Advanced) Populates output vector q_out and with the generalized positions for model_instance from a vector q of generalized positions for the entire model.
This method throws an exception if q is not of size MultibodyPlant::num_positions().
| VectorX< double > GetPositionUpperLimits | ( | ) | const |
Upper limit analog of GetPositionLowerLimits(), where any unbounded or unspecified limits will be +infinity.
| const RigidBody< T > & GetRigidBodyByName | ( | std::string_view | name | ) | const |
Returns a constant reference to a rigid body that is identified by the string name in this model.
| std::exception | if there is no body with the requested name. |
| std::exception | if the body name occurs in multiple model instances. |
| std::exception | if the requested body is not a RigidBody. |
| const RigidBody< T > & GetRigidBodyByName | ( | std::string_view | name, |
| ModelInstanceIndex | model_instance ) const |
Returns a constant reference to the rigid body that is uniquely identified by the string name in model_instance.
| std::exception | if there is no body with the requested name. |
| std::exception | if the requested body is not a RigidBody. |
| std::exception | if model_instance is not valid for this model. |
| std::vector< std::string > GetStateNames | ( | bool | add_model_instance_prefix = true | ) | const |
Returns a list of string names corresponding to each element of the multibody state vector.
These strings take the form {model_instance_name}_{joint_name}_{joint_position_suffix |
joint_velocity_suffix}, but the prefix may optionally be withheld using add_model_instance_prefix.
The returned names are guaranteed to be unique if add_model_instance_prefix is true (the default).
| std::exception | if the plant is not finalized. |
| std::vector< std::string > GetStateNames | ( | ModelInstanceIndex | model_instance, |
| bool | add_model_instance_prefix = false ) const |
Returns a list of string names corresponding to each element of the multibody state vector.
These strings take the form {model_instance_name}_{joint_name}_{joint_position_suffix |
joint_velocity_suffix}, but the prefix may optionally be withheld using add_model_instance_prefix.
The returned names are guaranteed to be unique.
| std::exception | if the plant is not finalized or if the model_instance is invalid. |
| std::string GetTopologyGraphvizString | ( | ) | const |
Returns a Graphviz string describing the topology of this plant.
To render the string, use the Graphviz tool, dot. http://www.graphviz.org/
Note: this method can be called either before or after Finalize().
| const RigidBody< T > & GetUniqueFloatingBaseBodyOrThrow | ( | ModelInstanceIndex | model_instance | ) | const |
If there is a single base body in the model given by model_instance, and that body is a floating base body, returns that floating base body.
Otherwise, throws an exception. Use HasUniqueFloatingBaseBody() to check first.
See above for details.
| std::exception | if called pre-finalize. |
| std::exception | if model_instance is not valid. |
| std::exception | if !HasUniqueFloatingBaseBody(model_instance). |
| Eigen::VectorBlock< const VectorX< T > > GetVelocities | ( | const systems::Context< T > & | context | ) | const |
Returns a const vector reference to the generalized velocities v in a given Context.
| std::exception | if context does not correspond to the Context for a multibody model. |
| VectorX< T > GetVelocities | ( | const systems::Context< T > & | context, |
| ModelInstanceIndex | model_instance ) const |
Returns a vector containing the generalized velocities v of a specified model instance in a given Context.
| std::exception | if context does not correspond to the Context for a multibody model or model_instance is invalid. |
| void GetVelocities | ( | const systems::Context< T > & | context, |
| ModelInstanceIndex | model_instance, | ||
| EigenPtr< VectorX< T > > | v_out ) const |
(Advanced) Populates output vector v_out with the generalized velocities v of a specified model instance in a given Context.
| std::exception | if context does not correspond to the Context for a multibody model or model_instance is invalid. |
| VectorX< T > GetVelocitiesFromArray | ( | ModelInstanceIndex | model_instance, |
| const Eigen::Ref< const VectorX< T > > & | v ) const |
Returns a vector of generalized velocities for model_instance from a vector v of generalized velocities for the entire MultibodyPlant model.
This method throws an exception if the input array is not of size MultibodyPlant::num_velocities().
| void GetVelocitiesFromArray | ( | ModelInstanceIndex | model_instance, |
| const Eigen::Ref< const VectorX< T > > & | v, | ||
| EigenPtr< VectorX< T > > | v_out ) const |
(Advanced) Populates output vector v_out with the generalized velocities for model_instance from a vector v of generalized velocities for the entire model.
This method throws an exception if v is not of size MultibodyPlant::num_velocities().
| VectorX< double > GetVelocityLowerLimits | ( | ) | const |
Returns a vector of size num_velocities() containing the lower velocity limits for every generalized velocity coordinate.
These include joint and free body coordinates. Any unbounded or unspecified limits will be -infinity.
| std::exception | if called pre-finalize. |
| std::vector< std::string > GetVelocityNames | ( | bool | add_model_instance_prefix = true, |
| bool | always_add_suffix = true ) const |
Returns a list of string names corresponding to each element of the velocity vector.
These strings take the form {model_instance_name}_{joint_name}_{joint_velocity_suffix}, but the prefix and suffix may optionally be withheld using add_model_instance_prefix and always_add_suffix.
| always_add_suffix | (optional). If true, then the suffix is always added. If false, then the suffix is only added for joints that have more than one position (in this case, not adding would lead to ambiguity). |
The returned names are guaranteed to be unique if add_model_instance_prefix is true (the default).
| std::exception | if the plant is not finalized. |
| std::vector< std::string > GetVelocityNames | ( | ModelInstanceIndex | model_instance, |
| bool | add_model_instance_prefix = false, | ||
| bool | always_add_suffix = true ) const |
Returns a list of string names corresponding to each element of the velocity vector.
These strings take the form {model_instance_name}_{joint_name}_{joint_velocity_suffix}, but the prefix and suffix may optionally be withheld using add_model_instance_prefix and always_add_suffix.
| always_add_suffix | (optional). If true, then the suffix is always added. If false, then the suffix is only added for joints that have more than one position (in this case, not adding would lead to ambiguity). |
The returned names are guaranteed to be unique.
| std::exception | if the plant is not finalized or if the model_instance is invalid. |
| VectorX< double > GetVelocityUpperLimits | ( | ) | const |
Upper limit analog of GetVelocitysLowerLimits(), where any unbounded or unspecified limits will be +infinity.
| const std::vector< geometry::GeometryId > & GetVisualGeometriesForBody | ( | const RigidBody< T > & | body | ) | const |
Returns an array of GeometryId's identifying the different visual geometries for body previously registered with a SceneGraph.
| const internal::LinkJointGraph & graph | ( | ) | const |
(Internal use only) Provides access to the internal::LinkJointGraph.
You can use graph().forest() to access the as-built internal::SpanningForest if you've already called Finalize().
| const UniformGravityFieldElement< T > & gravity_field | ( | ) | const |
An accessor to the current gravity field.
| bool has_body | ( | BodyIndex | body_index | ) | const |
Returns true if plant has a rigid body with unique index body_index.
| bool has_joint | ( | JointIndex | joint_index | ) | const |
Returns true if plant has a joint with unique index joint_index.
The value could be false if the joint was removed using RemoveJoint().
| bool has_joint_actuator | ( | JointActuatorIndex | actuator_index | ) | const |
Returns true if plant has a joint actuator with unique index actuator_index.
The value could be false if the actuator was removed using RemoveJointActuator().
| bool has_sampled_output_ports | ( | ) | const |
(Advanced) If this plant is continuous (i.e., is_discrete() is false), returns false.
If this plant is discrete, returns whether or not the output ports are sampled (change only at a time step boundary) or live (instantaneously reflect changes to the input ports). See Output port sampling for details.
| bool HasBodyNamed | ( | std::string_view | name | ) | const |
| std::exception | if the body name occurs in multiple model instances. |
| bool HasBodyNamed | ( | std::string_view | name, |
| ModelInstanceIndex | model_instance ) const |
model_instance. | std::exception | if model_instance is not valid for this model. |
| bool HasFrameNamed | ( | std::string_view | name | ) | const |
| std::exception | if the frame name occurs in multiple model instances. |
| bool HasFrameNamed | ( | std::string_view | name, |
| ModelInstanceIndex | model_instance ) const |
model_instance. | std::exception | if model_instance is not valid for this model. |
| bool HasJointActuatorNamed | ( | std::string_view | name | ) | const |
| std::exception | if the actuator name occurs in multiple model instances. |
| bool HasJointActuatorNamed | ( | std::string_view | name, |
| ModelInstanceIndex | model_instance ) const |
model_instance. | std::exception | if model_instance is not valid for this model. |
| bool HasJointNamed | ( | std::string_view | name | ) | const |
| std::exception | if the joint name occurs in multiple model instances. |
| bool HasJointNamed | ( | std::string_view | name, |
| ModelInstanceIndex | model_instance ) const |
model_instance. | std::exception | if model_instance is not valid for this model. |
| bool HasModelInstanceNamed | ( | std::string_view | name | ) | const |
| bool HasUniqueFloatingBaseBody | ( | ModelInstanceIndex | model_instance | ) | const |
Returns true if there is a single base body in the model given by model_instance, and that body is a floating base body.
See above for details.
| std::exception | if called pre-finalize. |
| std::exception | if model_instance is not valid. |
| bool is_finalized | ( | ) | const |
Returns true if this MultibodyPlant was finalized with a call to Finalize().
| bool is_gravity_enabled | ( | ModelInstanceIndex | model_instance | ) | const |
| std::exception | if the model instance is invalid. |
| bool IsAnchored | ( | const RigidBody< T > & | body | ) | const |
Returns true if body is anchored (i.e.
the kinematic path between body and the world only contains weld joints.)
| std::exception | if called pre-finalize. |
| bool IsVelocityEqualToQDot | ( | ) | const |
Returns true iff the generalized velocity v is exactly the time derivative q̇ of the generalized coordinates q.
In this case MapQDotToVelocity() and MapVelocityToQDot() implement the identity map. This method is, in the worst case, O(n), where n is the number of joints.
| MatrixX< T > MakeActuationMatrix | ( | ) | const |
This method creates an actuation matrix B mapping a vector of actuation values u into generalized forces tau_u = B * u, where B is a matrix of size nv x nu with nu equal to num_actuated_dofs() and nv equal to num_velocities().
The vector u of actuation values is of size num_actuated_dofs(). For a given JointActuator, u[JointActuator::input_start()] stores the value for the external actuation corresponding to that actuator. tau_u on the other hand is indexed by generalized velocity indices according to Joint::velocity_start().
| Eigen::SparseMatrix< double > MakeActuationMatrixPseudoinverse | ( | ) | const |
Creates the pseudoinverse of the actuation matrix B directly (without requiring an explicit inverse calculation).
Notably, when B is full row rank (the system is fully actuated), then the pseudoinverse is a true inverse.
| MatrixX< double > MakeActuatorSelectorMatrix | ( | const std::vector< JointActuatorIndex > & | user_to_actuator_index_map | ) | const |
This method allows user to map a vector uₛ containing the actuation for a set of selected actuators into the vector u containing the actuation values for this full model.
The mapping, or selection, is returned in the form of a selector matrix Su such that u = Su⋅uₛ. The size nₛ of uₛ is always smaller or equal than the size of the full vector of actuation values u. That is, a user might be interested in only a given subset of actuators in the model.
This selection matrix is particularly useful when adding PID control on a portion of the state, see systems::controllers::PidController.
A user specifies the preferred order in uₛ via user_to_actuator_index_map. The actuation values in uₛ are a concatenation of the values for each actuator in the order they appear in user_to_actuator_index_map. The actuation value in the full vector of actuation values u for a particular actuator can be found at offset JointActuator::input_start().
| MatrixX< double > MakeActuatorSelectorMatrix | ( | const std::vector< JointIndex > & | user_to_joint_index_map | ) | const |
Alternative signature to build an actuation selector matrix Su such that u = Su⋅uₛ, where u is the vector of actuation values for the full model (see get_actuation_input_port()) and uₛ is a vector of actuation values for the actuators acting on the joints listed by user_to_joint_index_map.
It is assumed that all joints referenced by user_to_joint_index_map are actuated. See MakeActuatorSelectorMatrix(const std::vector<JointActuatorIndex>&) for details.
| std::exception | if any of the joints in user_to_joint_index_map does not have an actuator. |
| Eigen::SparseMatrix< T > MakeQDotToVelocityMap | ( | const systems::Context< T > & | context | ) | const |
Returns the matrix N⁺(q), which maps v = N⁺(q)⋅q̇, as described in MapQDotToVelocity().
Prefer calling MapQDotToVelocity() directly; this entry point is provided to support callers that require the explicit linear form (once q is given) of the relationship. This method is, in the worst case, O(n), where n is the number of joints.
| [in] | context | The context containing the state of the model. |
| MatrixX< double > MakeStateSelectorMatrix | ( | const std::vector< JointIndex > & | user_to_joint_index_map | ) | const |
This method allows users to map the state of this model, x, into a vector of selected state xₛ with a given preferred ordering.
The mapping, or selection, is returned in the form of a selector matrix Sx such that xₛ = Sx⋅x. The size nₛ of xₛ is always smaller or equal than the size of the full state x. That is, a user might be interested in only a given portion of the full state x.
This selection matrix is particularly useful when adding PID control on a portion of the state, see systems::controllers::PidController.
A user specifies the preferred order in xₛ via user_to_joint_index_map. The selected state is built such that selected positions are followed by selected velocities, as in xₛ = [qₛ, vₛ]. The positions in qₛ are a concatenation of the positions for each joint in the order they appear in user_to_joint_index_map. That is, the positions for user_to_joint_index_map[0] are first, followed by the positions for user_to_joint_index_map[1], etc. Similarly for the selected velocities vₛ.
| std::exception | if there are repeated indices in user_to_joint_index_map. |
| Eigen::SparseMatrix< T > MakeVelocityToQDotMap | ( | const systems::Context< T > & | context | ) | const |
Returns the matrix N(q), which maps q̇ = N(q)⋅v, as described in MapVelocityToQDot().
Prefer calling MapVelocityToQDot() directly; this entry point is provided to support callers that require the explicit linear form (once q is given) of the relationship. Do not take the (pseudo-)inverse of N(q); call MakeQDotToVelocityMap instead. This method is, in the worst case, O(n), where n is the number of joints.
| [in] | context | The context containing the state of the model. |
| void MapQDotToVelocity | ( | const systems::Context< T > & | context, |
| const Eigen::Ref< const VectorX< T > > & | qdot, | ||
| EigenPtr< VectorX< T > > | v ) const |
Transforms the time derivative qdot of the generalized positions vector q (stored in context) to generalized velocities v.
v and q̇ are related linearly by q̇ = N(q)⋅v. Although N(q) is not necessarily square, its left pseudo-inverse N⁺(q) can be used to invert that relationship without residual error, provided that qdot is in the range space of N(q) (that is, if it could have been produced as q̇ = N(q)⋅v for some v). Using the configuration q stored in the given context this method calculates v = N⁺(q)⋅q̇.
| [in] | context | The context containing the state of the model. |
| [in] | qdot | A vector containing the time derivatives of the generalized positions. This method aborts if qdot is not of size num_positions(). |
| [out] | v | A valid (non-null) pointer to a vector in ℛⁿ with n the number of generalized velocities. This method aborts if v is nullptr or if it is not of size num_velocities(). |
| void MapVelocityToQDot | ( | const systems::Context< T > & | context, |
| const Eigen::Ref< const VectorX< T > > & | v, | ||
| EigenPtr< VectorX< T > > | qdot ) const |
Transforms generalized velocities v to time derivatives qdot of the generalized positions vector q (stored in context).
v and qdot are related linearly by q̇ = N(q)⋅v. Using the configuration q stored in the given context this method calculates q̇ = N(q)⋅v.
| [in] | context | The context containing the state of the model. |
| [in] | v | A vector of generalized velocities for this model. This method aborts if v is not of size num_velocities(). |
| [out] | qdot | A valid (non-null) pointer to a vector in ℝⁿ with n being the number of generalized positions in this model, given by num_positions(). This method aborts if qdot is nullptr or if it is not of size num_positions(). |
| DeformableModel< T > & mutable_deformable_model | ( | ) |
Returns a mutable reference to the DeformableModel owned by this plant.
| std::exception | if the plant is finalized. |
| UniformGravityFieldElement< T > & mutable_gravity_field | ( | ) |
A mutable accessor to the current gravity field.
| int num_actuated_dofs | ( | ) | const |
Returns the total number of actuated degrees of freedom.
That is, the vector of actuation values u has this size. See AddJointActuator().
| int num_actuated_dofs | ( | ModelInstanceIndex | model_instance | ) | const |
Returns the total number of actuated degrees of freedom for a specific model instance.
That is, the vector of actuation values u has this size. See AddJointActuator().
| std::exception | if called pre-finalize. |
| int num_actuators | ( | ) | const |
Returns the number of joint actuators in the model.
| int num_actuators | ( | ModelInstanceIndex | model_instance | ) | const |
Returns the number of actuators for a specific model instance.
| std::exception | if called pre-finalize. |
| int num_ball_constraints | ( | ) | const |
Returns the total number of ball constraints specified by the user.
| int num_bodies | ( | ) | const |
Returns the number of RigidBody elements in the model, including the "world" RigidBody, which is always part of the model.
| int num_collision_geometries | ( | ) | const |
Returns the number of geometries registered for contact modeling.
This method can be called at any time during the lifetime of this plant, either pre- or post-finalize, see Finalize(). Post-finalize calls will always return the same value.
| int num_constraints | ( | ) | const |
Returns the total number of constraints specified by the user.
| int num_coupler_constraints | ( | ) | const |
Returns the total number of coupler constraints specified by the user.
| int num_distance_constraints | ( | ) | const |
Returns the total number of distance constraints specified by the user.
| int num_force_elements | ( | ) | const |
Returns the number of ForceElement objects.
| int num_frames | ( | ) | const |
Returns the number of Frame objects in this model.
Frames include body frames associated with each of the bodies, including the world body. This means the minimum number of frames is one.
| int num_joints | ( | ) | const |
Returns the number of joints in the model.
| int num_model_instances | ( | ) | const |
Returns the number of model instances in the model.
| int num_multibody_states | ( | ) | const |
Returns the size of the multibody system state vector x = [q v].
This will be num_positions() plus num_velocities().
| std::exception | if called pre-finalize. |
| int num_multibody_states | ( | ModelInstanceIndex | model_instance | ) | const |
Returns the size of the multibody system state vector xᵢ = [qᵢ vᵢ] for model instance i.
(Here qᵢ ⊆ q and vᵢ ⊆ v.) will be num_positions(model_instance) plus num_velocities(model_instance).
| std::exception | if called pre-finalize. |
| int num_positions | ( | ) | const |
Returns the size of the generalized position vector q for this model.
| std::exception | if called pre-finalize. |
| int num_positions | ( | ModelInstanceIndex | model_instance | ) | const |
Returns the size of the generalized position vector qᵢ for model instance i.
| std::exception | if called pre-finalize. |
| int num_tendon_constraints | ( | ) | const |
Returns the total number of tendon constraints specified by the user.
| int num_velocities | ( | ) | const |
Returns the size of the generalized velocity vector v for this model.
| std::exception | if called pre-finalize. |
| int num_velocities | ( | ModelInstanceIndex | model_instance | ) | const |
Returns the size of the generalized velocity vector vᵢ for model instance i.
| std::exception | if called pre-finalize. |
| int num_visual_geometries | ( | ) | const |
Returns the number of geometries registered for visualization.
This method can be called at any time during the lifetime of this plant, either pre- or post-finalize, see Finalize(). Post-finalize calls will always return the same value.
| int num_weld_constraints | ( | ) | const |
Returns the total number of weld constraints specified by the user.
| int NumBodiesWithName | ( | std::string_view | name | ) | const |
|
delete |
|
delete |
| geometry::SourceId RegisterAsSourceForSceneGraph | ( | geometry::SceneGraph< T > * | scene_graph | ) |
Registers this plant to serve as a source for an instance of SceneGraph.
This registration allows MultibodyPlant to register geometry with scene_graph for visualization and/or collision queries. The string returned by this->get_name() is passed to SceneGraph's RegisterSource, so it is highly recommended that you give the plant a recognizable name before calling this. Successive registration calls with SceneGraph must be performed on the same instance to which the pointer argument scene_graph points to. Failure to do so will result in runtime exceptions.
| scene_graph | A valid non nullptr to the SceneGraph instance for which this plant will sever as a source, see SceneGraph documentation for further details. |
| std::exception | if called post-finalize. |
| std::exception | if scene_graph is the nullptr. |
| std::exception | if called more than once. |
| geometry::GeometryId RegisterCollisionGeometry | ( | const RigidBody< T > & | body, |
| const math::RigidTransform< double > & | X_BG, | ||
| const geometry::Shape & | shape, | ||
| const std::string & | name, | ||
| const CoulombFriction< double > & | coulomb_friction ) |
Overload which specifies a single property: coulomb_friction.
| geometry::GeometryId RegisterCollisionGeometry | ( | const RigidBody< T > & | body, |
| const math::RigidTransform< double > & | X_BG, | ||
| const geometry::Shape & | shape, | ||
| const std::string & | name, | ||
| geometry::ProximityProperties | properties ) |
Registers geometry in a SceneGraph with a given geometry::Shape to be used for the contact modeling of a given body.
More than one geometry can be registered with a body, in which case the body's contact geometry is the union of all geometries registered to that body.
| [in] | body | The body for which geometry is being registered. |
| [in] | X_BG | The fixed pose of the geometry frame G in the body frame B. |
| [in] | shape | The geometry::Shape used for collision and contact. E.g.: geometry::Sphere, geometry::Cylinder, etc. |
| [in] | properties | The proximity properties associated with the collision geometry. |
| std::exception | if called post-finalize. |
| geometry::GeometryId RegisterVisualGeometry | ( | const RigidBody< T > & | body, |
| const math::RigidTransform< double > & | X_BG, | ||
| const geometry::Shape & | shape, | ||
| const std::string & | name ) |
Overload for visual geometry registration.
The ("label", "id") property is set in the perception properties (as documented above).
See the overview for more details.
| geometry::GeometryId RegisterVisualGeometry | ( | const RigidBody< T > & | body, |
| const math::RigidTransform< double > & | X_BG, | ||
| const geometry::Shape & | shape, | ||
| const std::string & | name, | ||
| const geometry::IllustrationProperties & | properties ) |
Registers geometry in a SceneGraph with a given geometry::Shape to be used for visualization of a given body.
The perception properties are a copy of the given properties. If the resulting perception properties do not include ("label", "id"), then it is added as documented above.
See the overview for more details.
| [in] | body | The body for which geometry is being registered. |
| [in] | X_BG | The fixed pose of the geometry frame G in the body frame B. |
| [in] | shape | The geometry::Shape used for visualization. E.g.: geometry::Sphere, geometry::Cylinder, etc. |
| [in] | name | The name for the geometry. It must satisfy the requirements defined in geometry::GeometryInstance. |
| [in] | properties | The illustration properties for this geometry. |
| std::exception | if called post-finalize. |
| geometry::GeometryId RegisterVisualGeometry | ( | const RigidBody< T > & | body, |
| const math::RigidTransform< double > & | X_BG, | ||
| const geometry::Shape & | shape, | ||
| const std::string & | name, | ||
| const Vector4< double > & | diffuse_color ) |
Overload for visual geometry registration.
The following properties are set:
See the overview for more details.
| geometry::GeometryId RegisterVisualGeometry | ( | const RigidBody< T > & | body, |
| std::unique_ptr< geometry::GeometryInstance > | geometry_instance ) |
Registers the given geometry_instance in a SceneGraph to be used for visualization of a given body.
The roles that geometry_instance gets assigned (illustration/perception) in SceneGraph depend solely on the properties that have already been assigned to geometry_instance. If any visual roles have been assigned, those will be the only roles used. If no visual roles have been assigned, then both roles will be assigned using the default set of property values.
If the registered geometry has the perception role, it will have the ("label", "id") property. Possibly assigned as documented above.
See the overview for more details.
| [in] | body | The body for which geometry is being registered. |
| [in] | geometry_instance | The geometry to associate with the visual appearance of body. |
| std::exception | if geometry_instance is null. |
| std::exception | if called post-finalize. |
| void RemoveAllJointActuatorEffortLimits | ( | ) |
Removes the effort limits on all joint actuators.
(In other words, sets all effort limits to +∞.) This is a convenient way to obtain a plant without any built-in effort limits, in case models loaded by the Parser have unwanted limits.
| void RemoveConstraint | ( | MultibodyConstraintId | id | ) |
Removes the constraint id from the plant.
Note that this will not remove constraints registered directly with DeformableModel.
| std::exception | if the MultibodyPlant has already been finalized. |
| std::exception | if id does not identify any multibody constraint in this plant. |
| void RemoveJoint | ( | const Joint< T > & | joint | ) |
Removes and deletes joint from this MultibodyPlant.
Any existing references to joint will become invalid, and future calls to get_joint(joint_index) will throw an exception. Other elements of the plant may depend on joint at the time of removal and should be removed first. For example, a JointActuator that depends on joint should be removed with RemoveJointActuator(). Currently, we do not provide joint dependency tracking for force elements or constraints, so this function will throw an exception if there are any user-added force elements or constraints in the plant.
| std::exception | if the plant is already finalized. |
| std::exception | if the plant contains a non-zero number of user-added force elements or user-added constraints. |
| std::exception | if joint has a dependent JointActuator. |
| void RemoveJointActuator | ( | const JointActuator< T > & | actuator | ) |
Removes and deletes actuator from this MultibodyPlant.
Any existing references to actuator will become invalid, and future calls to get_joint_actuator(actuator_index) will throw an exception.
| std::exception | if the plant is already finalized. |
| void RenameModelInstance | ( | ModelInstanceIndex | model_instance, |
| const std::string & | name ) |
Renames an existing model instance.
| [in] | model_instance | The instance to rename. |
| [in] | name | A string that uniquely identifies the instance within this model. |
| std::exception | if called after Finalize(). |
| std::exception | if model_instance is not a valid index. |
| std::exception | if HasModelInstanceNamed(name) is true. |
| void set_adjacent_bodies_collision_filters | ( | bool | value | ) |
Sets whether to apply collision filters to topologically adjacent bodies at Finalize() time.
Filters are applied when there exists a joint between bodies, except in the case of 6-dof joints or joints in which the parent body is world.
| std::exception | iff called post-finalize. |
| void set_contact_model | ( | ContactModel | model | ) |
Sets the contact model to be used by this MultibodyPlant, see ContactModel for available options.
The default contact model is ContactModel::kHydroelasticWithFallback.
| std::exception | iff called post-finalize. |
| void set_contact_surface_representation | ( | geometry::HydroelasticContactRepresentation | representation | ) |
Sets the representation of contact surfaces to be used by this MultibodyPlant.
See geometry::HydroelasticContactRepresentation for available options. See GetDefaultContactSurfaceRepresentation() for explanation of default values.
| std::exception | if called post-finalize. |
| void set_discrete_contact_approximation | ( | DiscreteContactApproximation | approximation | ) |
Sets the discrete contact model approximation.
| iff | this plant is continuous (i.e. is_discrete() is false.) |
| std::exception | iff called post-finalize. |
| void set_gravity_enabled | ( | ModelInstanceIndex | model_instance, |
| bool | is_enabled ) |
Sets is_gravity_enabled() for model_instance to is_enabled.
The effect of is_enabled = false is effectively equivalent to disabling (or making zero) gravity for all bodies in the specified model instance. By default is_gravity_enabled() equals true for all model instances.
| std::exception | if called post-finalize. |
| std::exception | if the model instance is invalid. |
| void set_penetration_allowance | ( | double | penetration_allowance = MultibodyPlantConfig{}.penetration_allowance | ) |
Sets a penetration allowance used to estimate the point contact stiffness and Hunt & Crossley dissipation parameters.
Refer to the section Point Contact Default Parameters for further details.
| std::exception | if penetration_allowance is not positive. |
| void set_sap_near_rigid_threshold | ( | double | near_rigid_threshold = MultibodyPlantConfig{}.sap_near_rigid_threshold | ) |
Non-negative dimensionless number typically in the range [0.0, 1.0], though larger values are allowed even if uncommon.
This parameter controls the "near rigid" regime of the SAP solver, β in section V.B of [Castro et al., 2021]. It essentially controls a threshold value for the maximum amount of stiffness SAP can handle robustly. Beyond this value, stiffness saturates as explained in [Castro et al., 2021]. A value of 1.0 is a conservative choice to avoid ill-conditioning that might lead to softer than expected contact. If this is your case, consider turning off this approximation by setting this parameter to zero. For difficult cases where ill-conditioning is a problem, a small but non-zero number can be used, e.g. 1.0e-3.
| std::exception | if near_rigid_threshold is negative. |
| std::exception | if called post-finalize. |
| void set_stiction_tolerance | ( | double | v_stiction = MultibodyPlantConfig{}.stiction_tolerance | ) |
Currently MultibodyPlant uses the Stribeck approximation to model dry friction. The Stribeck model of friction is an approximation to Coulomb's law of friction that allows using continuous time integration without the need to specify complementarity constraints. While this results in a simpler model immediately tractable with standard numerical methods for integration of ODE's, it often leads to stiff dynamics that require an explicit integrator to take very small time steps. It is therefore recommended to use error controlled integrators when using this model or the discrete time stepping (see Simulation of Multibody Systems with Frictional Contact). See Continuous Approximation of Coulomb Friction for a detailed discussion of the Stribeck model.
Sets the stiction tolerance v_stiction for the Stribeck model, where v_stiction must be specified in m/s (meters per second.) v_stiction defaults to a value of 1 millimeter per second. In selecting a value for v_stiction, you must ask yourself the question, "When two objects are ostensibly in stiction, how much slip am I willing to allow?" There are two opposing design issues in picking a value for vₛ. On the one hand, small values of vₛ make the problem numerically stiff during stiction, potentially increasing the integration cost. On the other hand, it should be picked to be appropriate for the scale of the problem. For example, a car simulation could allow a "large" value for vₛ of 1 cm/s (1×10⁻² m/s), but reasonable stiction for grasping a 10 cm box might require limiting residual slip to 1×10⁻³ m/s or less. Ultimately, picking the largest viable value will allow your simulation to run faster and more robustly. Note that v_stiction is the slip velocity that we'd have when we are at edge of the friction cone. For cases when the friction force is well within the friction cone the slip velocity will always be smaller than this value. See also Continuous Approximation of Coulomb Friction.
| std::exception | if v_stiction is non-positive. |
| void SetActuationInArray | ( | ModelInstanceIndex | model_instance, |
| const Eigen::Ref< const VectorX< T > > & | u_instance, | ||
| EigenPtr< VectorX< T > > | u ) const |
Given actuation values u_instance for the actuators in model_instance, this function updates the actuation vector u for the entire plant model to which this actuator belongs to.
Refer to Actuation for further details.
| [in] | u_instance | Actuation values for the model instance. Values are ordered by monotonically increasing JointActuatorIndex within the model instance. |
| [in,out] | u | Actuation values for the entire plant model. The actuation value in u for a particular actuator must be found at offset JointActuator::input_start(). Only values corresponding to model_instance are changed. |
| std::exception | if the size of u_instance is not equal to the number of actuation inputs for the joints of model_instance. |
| void SetBaseBodyJointType | ( | BaseBodyJointType | joint_type, |
| std::optional< ModelInstanceIndex > | model_instance = {} ) |
Sets the type of joint to be used by Finalize() to connect any otherwise unconnected bodies to World.
Bodies connected by a joint to World are called base bodies and are determined during Finalize() when we build a forest structure to model the multibody system for efficient computation. See Working with free bodies for a longer discussion.
This can be set globally or for a particular model instance. Global options are used for any model elements that belong to model instances for which no options have been set explicitly. The default is to use a quaternion floating joint.
| BaseBodyJointType:: | Notes |
|---|---|
| kQuaternionFloatingJoint | 6 dofs, unrestricted orientation |
| kRpyFloatingJoint † | 6 dofs, uses 3 angles for orientation |
| kWeldJoint | 0 dofs, welded to World ("anchored") |
† The 3-angle orientation representation used by RpyFloatingJoint can be easier to work with than a quaternion (especially for optimization) but has a singular orientation which must be avoided (pitch angle near 90°).
| [in] | joint_type | The joint type to be used for base bodies. |
| [in] | model_instance | (optional) the index of the model instance to which joint_type is to be applied. |
| std::exception | if called after Finalize(). |
| void SetConstraintActiveStatus | ( | systems::Context< T > * | context, |
| MultibodyConstraintId | id, | ||
| bool | status ) const |
Sets the active status of the constraint given by id in context.
| std::exception | if the MultibodyPlant has not been finalized. |
| std::exception | if context == nullptr |
| std::exception | if id does not belong to any multibody constraint in context. |
| void SetDefaultFloatingBaseBodyPose | ( | const RigidBody< T > & | body, |
| const math::RigidTransform< double > & | X_WB ) |
Provisionally records a default World pose for body, to be used in case body turns out to be a floating base body after Finalize().
This may be called pre- or post-Finalize(). Pre-Finalize() this is the only way to set the default pose of a floating base body. Post-Finalize(), a floating base body's default pose may be set either by this function or by setting the default pose directly through the Joint API applied to the automatically-added floating joint. The most recent value set by either method will be used to initialize the floating joint's coordinates in subsequently-created Contexts.
See above for details.
| [in] | body | RigidBody whose default pose will be set if it turns out to be a floating base body. |
| [in] | X_WB | Default pose of the floating base body in the World frame. |
| void SetDefaultPositions | ( | const Eigen::Ref< const Eigen::VectorXd > & | q | ) |
Sets the default positions for the plant.
Calls to CreateDefaultContext or SetDefaultContext/SetDefaultState will return a Context populated with these position values. They have no other effects on the dynamics of the system.
| std::exception | if the plant is not finalized, if q is not of size num_positions(), or q contains non-finite values. |
| void SetDefaultPositions | ( | ModelInstanceIndex | model_instance, |
| const Eigen::Ref< const Eigen::VectorXd > & | q_instance ) |
Sets the default positions for the model instance.
Calls to CreateDefaultContext or SetDefaultContext/SetDefaultState will return a Context populated with these position values. They have no other effects on the dynamics of the system.
| std::exception | if the plant is not finalized, if the model_instance is invalid, if the length of q_instance is not equal to num_positions(model_instance), or if q_instance contains non-finite values. |
|
overridevirtual |
Sets state according to defaults set by the user for joints (e.g.
RevoluteJoint::set_default_angle()) and free bodies (SetDefaultFloatingBaseBodyPose()). If the user does not specify defaults, the state corresponds to zero generalized positions and velocities.
| std::exception | if called pre-finalize. See Finalize(). |
Reimplemented from LeafSystem< T >.
| void SetDiscreteUpdateManager | ( | std::unique_ptr< internal::DiscreteUpdateManager< T > > | manager | ) |
For use only by advanced developers wanting to try out their custom time stepping strategies, including contact resolution.
With this method MultibodyPlant takes ownership of manager.
| manager | After this call the new manager is used to advance discrete states. |
| std::exception | if called pre-finalize. See Finalize(). |
| void SetDistanceConstraintParams | ( | systems::Context< T > * | context, |
| MultibodyConstraintId | id, | ||
| DistanceConstraintParams | params ) const |
Stores in context the parameters params for the distance constraint with identifier id.
| [in,out] | context | The plant's context. On output it stores params for the requested distance constraint. |
| [in] | id | Unique identifier of the constraint. |
| [in] | params | The new set of parameters to be stored in context. |
| if | id is not a valid identifier for a distance constraint. |
| if | params.bodyA() or params.bodyB() do not correspond to rigid bodies in this MultibodyPlant. |
| void SetFloatingBaseBodyPoseInAnchoredFrame | ( | systems::Context< T > * | context, |
| const Frame< T > & | frame_F, | ||
| const RigidBody< T > & | body, | ||
| const math::RigidTransform< T > & | X_FB ) const |
Updates context to store the World-frame pose of floating base body B, given its pose X_FB in an arbitrary anchored frame F.
Frame F must be anchored, meaning that it is either on a body which is directly welded to a frame on the World body, or more generally, that it is on a body for which there is a kinematic path between that body and the world body that only includes weld joints.
See above for details.
| std::exception | if called pre-finalize. |
| std::exception | if frame F is not anchored to the world. |
| std::exception | if body is not a floating base body. |
| void SetFloatingBaseBodyPoseInWorldFrame | ( | systems::Context< T > * | context, |
| const RigidBody< T > & | body, | ||
| const math::RigidTransform< T > & | X_WB ) const |
Updates context to store the pose X_WB of a given floating base body B's body frame in the World frame W.
See above for details.
| std::exception | if called pre-finalize. |
| std::exception | if body is not a floating base body. |
| void SetFreeBodyPose | ( | const systems::Context< T > & | context, |
| systems::State< T > * | state, | ||
| const RigidBody< T > & | body, | ||
| const math::RigidTransform< T > & | X_JpJc ) const |
(Advanced) Variant of SetFreeBodyPose() that writes to a given state rather than directly to the Context.
| void SetFreeBodyPose | ( | systems::Context< T > * | context, |
| const RigidBody< T > & | body, | ||
| const math::RigidTransform< T > & | X_JpJc ) const |
For any free body's 6-dof joint, sets context to store the pose X_JpJc of child frame Jc in its parent frame Jp.
See above for details.
| std::exception | if called pre-finalize. |
| std::exception | if body is not a free body. |
| void SetFreeBodyRandomAnglesDistribution | ( | const RigidBody< T > & | body, |
| const math::RollPitchYaw< symbolic::Expression > & | angles ) |
For any free body's 6-dof joint, sets the distribution used by SetRandomState() to populate the orientation of its child frame Jc with respect to its parent frame Jp, expressed with roll-pitch-yaw angles.
Requires that the free body is modeled using an RpyFloatingJoint.
See above for details.
| std::exception | if called pre-finalize. |
| std::exception | if body is not a free body in the model. |
| std::exception | if the free body is not modeled with an RpyFloatingJoint. |
| void SetFreeBodyRandomRotationDistribution | ( | const RigidBody< T > & | body, |
| const Eigen::Quaternion< symbolic::Expression > & | rotation ) |
For any free body's 6-dof joint, sets the distribution used by SetRandomState() to populate the orientation of its child frame Jc with respect to its parent frame Jp, expressed as a quaternion.
Requires that the free body is modeled using a QuaternionFloatingJoint.
See above for details.
| std::exception | if called pre-finalize. |
| std::exception | if body is not a free body. |
| std::exception | if the free body is not modeled with a QuaternionFloatingJoint. |
| void SetFreeBodyRandomRotationDistributionToUniform | ( | const RigidBody< T > & | body | ) |
For any free body's 6-dof joint, sets the distribution used by SetRandomState() to populate the orientation of its child frame Jc with respect to its parent frame Jp using uniformly random rotations (expressed as a quaternion).
Requires that the free body is modeled using a QuaternionFloatingJoint.
See above for details.
| std::exception | if called pre-finalize. |
| std::exception | if body is not a free body in the model. |
| std::exception | if the free body is not modeled with a QuaternionFloatingJoint. |
| void SetFreeBodyRandomTranslationDistribution | ( | const RigidBody< T > & | body, |
| const Vector3< symbolic::Expression > & | translation ) |
For any free body's 6-dof joint, sets the distribution used by SetRandomState() to populate the x-y-z translation of its child frame Jc with respect to its parent frame Jp.
See above for details.
| std::exception | if called pre-finalize. |
| std::exception | if body is not a free body. |
| void SetFreeBodySpatialVelocity | ( | const systems::Context< T > & | context, |
| systems::State< T > * | state, | ||
| const RigidBody< T > & | body, | ||
| const SpatialVelocity< T > & | V_JpJc ) const |
(Advanced) Variant of SetFreeBodySpatialVelocity() that writes to a given state rather than directly to the Context.
| void SetFreeBodySpatialVelocity | ( | systems::Context< T > * | context, |
| const RigidBody< T > & | body, | ||
| const SpatialVelocity< T > & | V_JpJc ) const |
For any free body's 6-dof joint, sets context to store the spatial velocity V_JpJc of child frame Jc in its parent frame Jp.
See above for details.
| std::exception | if called pre-finalize. |
| std::exception | if body is not a free body. |
| void SetFuseWeldedLinks | ( | bool | fuse, |
| std::optional< ModelInstanceIndex > | model_instance = {} ) |
(Internal use only for now) Controls whether Link (RigidBody) elements that are welded to each other are to be fused onto a single mobilized body (a "fused mobod") in the generated model.
If so, those weld joints will not be modeled (i.e. will have no corresponding mobilizer) in the post-Finalize() model; there will be fewer mobilized bodies and modeled joints in the generated model than in the user's specification of links and joints. Regardless of whether fuse is true or false, results for calculations (e.g., positions & velocities) involving individual links can still be obtained by name or LinkIndex (BodyIndex). However, no results (e.g., no reaction forces) are available for fused weld joints on a mobod.
The fuse flag can be set globally or on a per-model instance basis. If SetFuseWeldedLinks() is called with a model instance then that setting is used for elements in that model instance; otherwise, the global setting is used.
You will be able to override this setting for individual weld joints, for example to model a force/torque sensor (not available yet).
The default global setting for Drake is not to combine welded RigidBody elements.
| [in] | fuse | Whether to fuse welded-together bodies. This only affects a particular model instance if the model_instance argument is also provided, otherwise it sets the global value. |
| [in] | model_instance | (optional) if present, specifies a particular model instance to which the fuse argument applies. |
| std::exception | if called after Finalize(). |
| void SetPositions | ( | const systems::Context< T > & | context, |
| systems::State< T > * | state, | ||
| ModelInstanceIndex | model_instance, | ||
| const Eigen::Ref< const VectorX< T > > & | q_instance ) const |
(Advanced) Sets the generalized positions q for a particular model instance in a given State from a given vector.
| std::exception | if the context is nullptr, if context does not correspond to the Context for a multibody model, if the model instance index is invalid, if the length of q_instance is not equal to num_positions(model_instance), or if q_instance contains non-finite values. |
| void SetPositions | ( | systems::Context< T > * | context, |
| const Eigen::Ref< const VectorX< T > > & | q ) const |
Sets the generalized positions q in a given Context from a given vector.
Prefer this method over GetMutablePositions().
| std::exception | if context is nullptr, if context does not correspond to the Context for a multibody model, if the length of q is not equal to num_positions(), or if q contains non-finite values. |
| void SetPositions | ( | systems::Context< T > * | context, |
| ModelInstanceIndex | model_instance, | ||
| const Eigen::Ref< const VectorX< T > > & | q_instance ) const |
Sets the generalized positions q for a particular model instance in a given Context from a given vector.
| std::exception | if the context is nullptr, if context does not correspond to the Context for a multibody model, if the model instance index is invalid, if the length of q_instance is not equal to num_positions(model_instance), or if q_instance contains non-finite values. |
| void SetPositionsAndVelocities | ( | systems::Context< T > * | context, |
| const Eigen::Ref< const VectorX< T > > & | q_v ) const |
Sets generalized positions q and generalized velocities v in a given Context from a given vector [q; v].
Prefer this method over GetMutablePositionsAndVelocities().
| std::exception | if context is nullptr, if context does not correspond to the context for a multibody model, if the length of q_v is not equal to num_positions() + num_velocities(), or if q_v contains non-finite values. |
| void SetPositionsAndVelocities | ( | systems::Context< T > * | context, |
| ModelInstanceIndex | model_instance, | ||
| const Eigen::Ref< const VectorX< T > > & | q_v ) const |
Sets generalized positions q and generalized velocities v from a given vector [q; v] for a specified model instance in a given Context.
| std::exception | if context is nullptr, if context does not correspond to the Context for a multibody model, if the model instance index is invalid, if the length of q_v is not equal to num_positions(model_instance) + num_velocities(model_instance), or if q_v contains non-finite values. |
| void SetPositionsInArray | ( | ModelInstanceIndex | model_instance, |
| const Eigen::Ref< const VectorX< T > > & | q_instance, | ||
| EigenPtr< VectorX< T > > | q ) const |
Sets the vector of generalized positions for model_instance in q using q_instance, leaving all other elements in the array untouched.
This method throws an exception if q is not of size MultibodyPlant::num_positions() or q_instance is not of size MultibodyPlant::num_positions(model_instance).
|
overridevirtual |
Assigns random values to all elements of the state, by drawing samples independently for each joint/free body (coming soon: and then solving a mathematical program to "project" these samples onto the registered system constraints).
If a random distribution is not specified for a joint/free body, the default state is used.
Reimplemented from System< T >.
| void SetUseSampledOutputPorts | ( | bool | use_sampled_output_ports | ) |
(Advanced) For a discrete-time plant, configures whether the output ports are sampled (the default) or live (opt-in).
See Output port sampling for details.
| std::exception | if the plant is already finalized. |
| std::exception | if use_sampled_output_ports is true but this MultibodyPlant is not a discrete model (is_discrete() == false). |
| void SetVelocities | ( | const systems::Context< T > & | context, |
| systems::State< T > * | state, | ||
| ModelInstanceIndex | model_instance, | ||
| const Eigen::Ref< const VectorX< T > > & | v_instance ) const |
(Advanced) Sets the generalized velocities v for a particular model instance in a given State from a given vector.
| std::exception | if the context is nullptr, if context does not correspond to the Context for a multibody model, if the model instance index is invalid, if the length of v_instance is not equal to num_velocities(model_instance), or if v_instance contains non-finite values. |
| void SetVelocities | ( | systems::Context< T > * | context, |
| const Eigen::Ref< const VectorX< T > > & | v ) const |
Sets the generalized velocities v in a given Context from a given vector.
Prefer this method over GetMutableVelocities().
| std::exception | if the context is nullptr, if the context does not correspond to the context for a multibody model, if the length of v is not equal to num_velocities(), or if v contains non-finite values. |
| void SetVelocities | ( | systems::Context< T > * | context, |
| ModelInstanceIndex | model_instance, | ||
| const Eigen::Ref< const VectorX< T > > & | v_instance ) const |
Sets the generalized velocities v for a particular model instance in a given Context from a given vector.
| std::exception | if the context is nullptr, if context does not correspond to the Context for a multibody model, if the model instance index is invalid, if the length of v_instance is not equal to num_velocities(model_instance), or if v_instance contains non-finite values. |
| void SetVelocitiesInArray | ( | ModelInstanceIndex | model_instance, |
| const Eigen::Ref< const VectorX< T > > & | v_instance, | ||
| EigenPtr< VectorX< T > > | v ) const |
Sets the vector of generalized velocities for model_instance in v using v_instance, leaving all other elements in the array untouched.
This method throws an exception if v is not of size MultibodyPlant::num_velocities(), v_instance is not of size MultibodyPlant::num_positions(model_instance), or v_instance contains non-finite values.
| double stiction_tolerance | ( | ) | const |
| double time_step | ( | ) | const |
The time step (or period) used to model this plant as a discrete system with periodic updates.
Returns 0 (zero) if the plant is modeled as a continuous system. This property of the plant is specified at construction and therefore this query can be performed either pre- or post-finalize, see Finalize().
| const WeldJoint< T > & WeldFrames | ( | const Frame< T > & | frame_on_parent_F, |
| const Frame< T > & | frame_on_child_M, | ||
| const math::RigidTransform< double > & | X_FM = math::RigidTransform< double >::Identity() ) |
Welds frame_on_parent_F and frame_on_child_M with relative pose X_FM.
That is, the pose of frame M in frame F is fixed, with value X_FM. If X_FM is omitted, the identity transform will be used. The call to this method creates and adds a new WeldJoint to the model. The new WeldJoint is named as: frame_on_parent_F.name() + "_welds_to_" + frame_on_child_M.name().
| std::exception | if the weld produces a duplicate joint name. |
| const RigidBody< T > & world_body | ( | ) | const |
Returns a constant reference to the world body.
| const RigidBodyFrame< T > & world_frame | ( | ) | const |
Returns a constant reference to the world frame.
|
Makes a new MultibodyPlant with discrete update period time_step and adds it to a diagram builder together with the provided SceneGraph instance, connecting the geometry ports.
| [in,out] | builder | Builder to add to. |
| [in] | time_step | The discrete update period for the new MultibodyPlant to be added. Please refer to the documentation provided in MultibodyPlant::MultibodyPlant(double) for further details on the parameter time_step. |
| [in] | scene_graph | (optional) Constructed scene graph. If none is provided, one will be created and used. |
| T | The scalar type, which must be one of the default scalars. |
|
Adds a MultibodyPlant and a SceneGraph instance to a diagram builder, connecting the geometry ports.
| [in,out] | builder | Builder to add to. |
| [in] | plant | Plant to be added to the builder. |
| [in] | scene_graph | (optional) Constructed scene graph. If none is provided, one will be created and used. |
| T | The scalar type, which must be one of the default scalars. |
|
friend |
|
friend |
|
friend |
|
friend |
|
friend |